–Я–Њ—Б–ї–µ–і–љ–Є–µ –љ–Њ–≤–Њ—Б—В–Є
–°–µ–љ—Б–Њ—А–љ—Л–є –і–∞—В—З–Є–Ї –њ–µ–і–∞–ї–Є –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞
–°–µ–љ—Б–Њ—А–љ—Л–є –і–∞—В—З–Є–Ї –њ–µ–і–∞–ї–Є –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞ вАФ –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–∞

–Ю–±—Й–Є–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –Э–∞ —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П –≤—Б—С –±–Њ–ї—М—И–µ–µ —З–Є—Б–ї–Њ —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л—Е —Г–Ј–ї–Њ–≤ –Є –і–µ—В–∞–ї–µ–є. –Э–∞—А—П–і—Г —Б –і—А—Г–≥–Є–Љ–Є –њ—А–Є—З–Є–љ–∞–Љ–Є, —Н—В–Њ–≥–Њ —В—А–µ–±—Г—О—В —В–∞–Ї–ґ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –Ј–∞–Ї–Њ–љ–Њ–і–∞—В–µ–ї—М—Б—В–≤–∞, –љ–∞–њ—А–Є–Љ–µ—А, –≤ –Њ—В–љ–Њ—И–µ–љ–Є–Є –Њ–≥—А–∞–љ–Є—З–µ–љ–Є—П –≤—Л–±—А–Њ—Б–∞ –≤—А–µ–і–љ—Л—Е –≥–∞–Ј–Њ–≤ –Є —А–∞—Б—Е–Њ–і–∞ —В–Њ–њ–ї–Є–≤–∞. –Т—Б—С –±–Њ–ї—М—И–µ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –Њ–љ–Є –љ–∞—Е–Њ–і—П—В –і–ї—П –њ–Њ–≤—Л—И–µ–љ–Є—П —Г—А–Њ–≤–љ—П –∞–Ї—В–Є–≤–љ–Њ–є –Є –њ–∞—Б—Б–Є–≤–љ–Њ–є –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є, –∞ —В–∞–Ї–ґ–µ –і–ї—П —Г–і–Њ–±—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Є –µ–Ј–і—Л. –Ш–Ј –љ–Є—Е —Б–∞–Љ—Л–Љ –≤–∞–ґ–љ—Л–Љ —Н–ї–µ–Љ–µ–љ—В–Њ–Љ —П–≤–ї—П–µ—В—Б—П —Б–µ–љ—Б–Њ—А–љ—Л–є –і–∞—В—З–Є–Ї –њ–µ–і–∞–ї–Є –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞ (–њ–µ–і–∞–ї—М–љ—Л–є –і–∞—В—З–Є–Ї –і–∞–≤–ї–µ–љ–Є—П).
–Ъ–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П
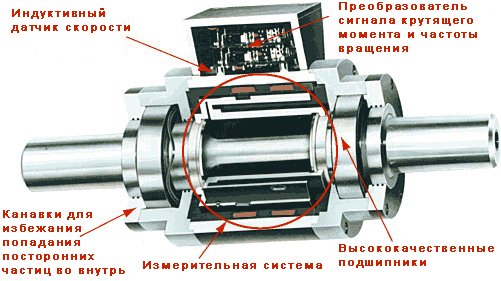
–Т –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е –≤—Б—С –±–Њ–ї—М—И–µ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –љ–∞—Е–Њ–і—П—В –±–µ—Б–Ї–Њ–љ—В–∞–Ї—В–љ–Њ–µ —Б–µ–љ—Б–Њ—А–љ—Л–µ –і–∞—В—З–Є–Ї–Є, –Є—Б–њ–Њ–ї—М–Ј—Г—О—Й–Є–µ –њ—А–Є–љ—Ж–Є–њ –Є–љ–і—Г–Ї—Ж–Є–Є. –Ґ–∞–Ї–Њ–є —Б–µ–љ—Б–Њ—А–љ—Л–є –і–∞—В—З–Є–Ї —Б–Њ—Б—В–Њ–Є—В –Є–Ј —Б—В–∞—В–Њ—А–∞, –Ї–∞—В—Г—И–Ї–Є –≤–Њ–Ј–±—Г–ґ–і–µ–љ–Є—П, –њ—А–Є—С–Љ–љ–Њ–є –Ї–∞—В—Г—И–Ї–Є, –∞ —В–∞–Ї–ґ–µ —Н–ї–µ–Ї—В—А–Њ–љ–љ–Њ–≥–Њ –Љ–Њ–і—Г–ї—П –і–ї—П –Њ—Ж–µ–љ–Ї–Є –і–∞–љ–љ—Л—Е (—Б–Љ–Њ—В—А–Є —З–µ—А—В—С–ґ) –Є —А–Њ—В–Њ—А–∞, —Б–Њ—Б—В–Њ—П—Й–µ–≥–Њ –Є–Ј –Њ–і–љ–Њ–є –Є–ї–Є –љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е —В–Њ–Ї–Њ–њ—А–Њ–≤–Њ–і—П—Й–Є—Е —А–∞–Љ–Њ–Ї –Њ–њ—А–µ–і–µ–ї—С–љ–љ–Њ–є –≥–µ–Њ–Љ–µ—В—А–Є–Є.
–Я—А–Є–љ—Ж–Є–њ –і–µ–є—Б—В–≤–Є—П
–Я–µ—А–µ–Љ–µ–љ–љ–Њ–µ –љ–∞–њ—А—П–ґ–µ–љ–Є–µ, –њ—А–Є–ї–Њ–ґ–µ–љ–љ–Њ–µ –Ї –њ–µ—А–µ–і–∞—О—Й–µ–є –Ї–∞—В—Г—И–Ї–µ, –≤—Л–Ј—Л–≤–∞–µ—В –Љ–∞–≥–љ–Є—В–љ–Њ–µ –њ–Њ–ї–µ, –Ї–Њ—В–Њ—А–Њ–µ –Є–љ–і—Г—Ж–Є—А—Г–µ—В –љ–∞–њ—А—П–ґ–µ–љ–Є—П –≤ –њ—А–Є—С–Љ–љ—Л—Е –Ї–∞—В—Г—И–Ї–∞—Е. –Т —В–Њ–Ї–Њ–њ—А–Њ–≤–Њ–і—П—Й–Є—Е —А–∞–Љ–Ї–∞—Е —А–Њ—В–Њ—А–∞ —В–∞–Ї–ґ–µ –Є–љ–і—Г—Ж–Є—А—Г–µ—В—Б—П —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–є —В–Њ–Ї, –Ї–Њ—В–Њ—А—Л–є –≤–ї–Є—П–µ—В –љ–∞ –Љ–∞–≥–љ–Є—В–љ–Њ–µ –њ–Њ–ї–µ –њ—А–Є—С–Љ–љ—Л—Е –Ї–∞—В—Г—И–µ–Ї. –Т –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –њ–Њ–ї–Њ–ґ–µ–љ–Є—П —А–Њ—В–Њ—А–∞ –њ–Њ –Њ—В–љ–Њ—И–µ–љ–Є—О –Ї –њ—А–Є—С–Љ–љ—Л–Љ –Ї–∞—В—Г—И–Ї–∞–Љ –≤ —Б—В–∞—В–Њ—А–µ –≥–µ–љ–µ—А–Є—А—Г—О—В—Б—П –∞–Љ–њ–ї–Є—В—Г–і—Л –љ–∞–њ—А—П–ґ–µ–љ–Є—П. –≠—В–Є –∞–Љ–њ–ї–Є—В—Г–і—Л –Њ–±—А–∞–±–∞—В—Л–≤–∞—О—В—Б—П –≤ —Н–ї–µ–Ї—В—А–Њ–љ–љ–Њ–Љ –Љ–Њ–і—Г–ї–µ –Є –њ–µ—А–µ–і–∞—О—В—Б—П –љ–∞ —Г–њ—А–∞–≤–ї—П—О—Й–Є–є –±–ї–Њ–Ї –≤ –≤–Є–і–µ –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ –љ–∞–њ—А—П–ґ–µ–љ–Є—П. –Т –±–ї–Њ–Ї–µ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б–Є–≥–љ–∞–ї –Њ—Ж–µ–љ–Є–≤–∞–µ—В—Б—П –Є –≤—Л–і–∞—С—В—Б—П —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–Є–є –Є–Љ–њ—Г–ї—М—Б, –љ–∞–њ—А–Є–Љ–µ—А, –љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Њ–є. –•–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–∞ –љ–∞–њ—А—П–ґ–µ–љ–Є—П —Б–Є–≥–љ–∞–ї–∞ –Ј–∞–≤–Є—Б–Є—В –Њ—В —Е–∞—А–∞–Ї—В–µ—А–∞ –≤–Њ–Ј–і–µ–є—Б—В–≤–Є—П –љ–∞ –њ–µ–і–∞–ї—М –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞.
–Я–Њ—Б–ї–µ–і—Б—В–≤–Є—П
–Т—Л—Е–Њ–і –Є–Ј —Б—В—А–Њ—П —Б–µ–љ—Б–Њ—А–љ–Њ–≥–Њ –і–∞—В—З–Є–Ї–∞ –њ–µ–і–∞–ї–Є –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞ –Љ–Њ–ґ–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М –≤—Л—Е–Њ–і–∞ –Є–Ј —Б—В—А–Њ—П –њ–Њ —Б–ї–µ–і—Г—О—Й–Є–Љ –њ—А–Є–Ј–љ–∞–Ї–∞–Љ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є: –і–≤–Є–≥–∞—В–µ–ї—М –њ–Њ–Ї–∞–Ј—Л–≤–∞–µ—В —З—А–µ–Ј–≤—Л—З–∞–є–љ–Њ –≤—Л—Б–Њ–Ї–Є–µ –Њ–±–Њ—А–Њ—В—Л —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М –љ–µ —А–µ–∞–≥–Є—А—Г–µ—В –љ–∞ –і–≤–Є–ґ–µ–љ–Є—П –њ–µ–і–∞–ї–Є –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М –њ–µ—А–µ—Е–Њ–і–Є—В –≤ ¬Ђ–∞–≤–∞—А–Є–є–љ—Л–є —А–µ–ґ–Є–Љ¬ї –Ј–∞–≥–Њ—А–∞–µ—В—Б—П –Ї–Њ–љ—В—А–Њ–ї—М–љ–∞—П –ї–∞–Љ–њ–Њ—З–Ї–∞ –і–≤–Є–≥–∞—В–µ–ї—П –љ–∞ –њ–∞–љ–µ–ї–Є –њ—А–Є–±–Њ—А–Њ–≤
–Я—А–Є—З–Є–љ–∞–Љ–Є –Њ—В–Ї–∞–Ј–∞ —Б–µ–љ—Б–Њ—А–љ–Њ–≥–Њ –і–∞—В—З–Є–Ї–∞ –Љ–Њ–≥—Г—В –±—Л—В—М: –њ–Њ–≤—А–µ–ґ–і—С–љ–љ—Л–µ –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Є –Є–ї–Є —А–∞–Ј—К—С–Љ—Л –љ–∞ –њ–µ–і–∞–ї–Є –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞ –љ–∞—А—Г—И–µ–љ–Є–µ –њ–Њ–і–∞—З–Є –љ–∞–њ—А—П–ґ–µ–љ–Є–µ –Є–ї–Є –Ї–Њ–љ—В–∞–Ї—В–∞ —Б –Љ–∞—Б—Б–Њ–є –љ–µ–Є—Б–њ—А–∞–≤–љ—Л–є —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –Љ–Њ–і—Г–ї—М –Њ—Ж–µ–љ–Ї–Є –і–∞–љ–љ—Л—Е —Б–µ–љ—Б–Њ—А–љ–Њ–≥–Њ –і–∞—В—З–Є–Ї–∞
–Я–Њ–Є—Б–Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є
–Ф–ї—П –њ–Њ–Є—Б–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є —Б–ї–µ–і—Г–µ—В –њ—А–µ–і–њ—А–Є–љ—П—В—М —Б–ї–µ–і—Г—О—Й–Є–µ –і–µ–є—Б—В–≤–Є—П: –Њ–Ј–љ–∞–Ї–Њ–Љ–Є—В—М—Б—П —Б –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–µ–є –±–∞–љ–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є –њ—А–Њ–Є–Ј–≤–µ—Б—В–Є –≤–Є–Ј—Г–∞–ї—М–љ—Л–є –Ї–Њ–љ—В—А–Њ–ї—М —Б–µ–љ—Б–Њ—А–љ–Њ–≥–Њ –і–∞—В—З–Є–Ї–∞ –њ–µ–і–∞–ї–Є –∞–Ї—Б–µ–ї–µ—А–∞—В–Њ—А–∞ –љ–∞ –љ–∞–ї–Є—З–Є–µ –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є—Е –њ–Њ–≤—А–µ–ґ–і–µ–љ–Є–є –њ—А–Њ–Є–Ј–≤–µ—Б—В–Є –≤–Є–Ј—Г–∞–ї—М–љ—Л–є –Ї–Њ–љ—В—А–Њ–ї—М —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–Є—Е —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є—Е —А–∞–Ј—К—С–Љ–Њ–≤ –Є –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Њ–≤ –љ–∞ –њ—А–∞–≤–Є–ї—М–љ–Њ—Б—В—М —Б–Њ–µ–і–Є–љ–µ–љ–Є—П –Є –љ–∞–ї–Є—З–Є–µ –≤–Њ–Ј–Љ–Њ–Ј–ґ–љ—Л—Е –њ–Њ–≤—А–µ–ґ–і–µ–љ–Є–є –њ—А–Њ–≤–µ—А–Є—В—М —Б–µ–љ—Б–Њ—А–љ—Л–є –і–∞—В—З–Є–Ї —Б –њ–Њ–Љ–Њ—Й—М—О –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞ –Є –Њ–Љ–Љ–µ—В—А–∞
–Э–∞ –њ—А–Є–Љ–µ—А–µ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П –Љ–µ—А—Б–µ–і–µ—Б-–±–µ–љ—Ж –Р-–Ї–ї–∞—Б—Б–∞ (168) 1,7 –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ—Л —Б–ї–µ–і—Г—О—Й–Є–µ –і–µ–є—Б—В–≤–Є—П –њ–Њ –њ—А–Њ–≤–µ—А–Ї–µ, —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ –і–∞–љ–љ—Л–µ –Є —А–Є—Б—Г–љ–Ї–Є, –Ї–Њ—В–Њ—А—Л–µ –Њ–±—К—П—Б–љ—П—О—В –њ—А–Њ—Ж–µ—Б—Б –њ–Њ–Є—Б–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є. –Ґ–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ –і–∞–љ–љ—Л–µ: —Б—Е–µ–Љ–∞ —А–∞–Ј—К—С–Љ–∞/—А–∞—Б—Ж–≤–µ—В–Ї–∞ –Ї–∞–±–µ–ї–µ–є –°–љ—П—В–Є–µ —Б–Є–≥–љ–∞–ї–∞ —Б –Ї–Њ–љ—В–∞–Ї—В–∞ –°5: –Ф–∞–љ–љ—Л–Љ –і–µ–є—Б—В–≤–Є–µ–Љ –њ—А–Њ–≤–µ—А—П–µ—В—Б—П –љ–∞–ї–Є—З–Є–µ –љ–∞–њ—А—П–ґ–µ–љ–Є—П –њ–Є—В–∞–љ–Є—П –љ–∞ —Б–µ–љ—Б–Њ—А–љ–Њ–Љ –і–∞—В—З–Є–Ї–µ.
–Ч–∞–ґ–Є–≥–∞–љ–Є–µ –≤–Ї–ї—О—З–Є—В—М / –≤—Л–Ї–ї—О—З–Є—В—М
–°–љ—П—В–Є–µ —Б–Є–≥–љ–∞–ї–∞ —Б –Ї–Њ–љ—В–∞–Ї—В–∞ –°9: –Т–Ї–ї—О—З–Є—В—М –Ј–∞–ґ–Є–≥–∞–љ–Є–µ, –љ–∞–ґ–∞—В—М –љ–∞ –њ–µ–і–∞–ї—М –Є –Њ—В–њ—Г—Б—В–Є—В—М –µ—С. –Я–Њ–і—К—С–Љ –Є —Б–њ–∞–і —Б–Є–≥–љ–∞–ї–∞ –Ј–∞–≤–Є—Б—В–Є –Њ—В —Б–Ї–Њ—А–Њ—Б—В–Є, —Б –Ї–Њ—В–Њ—А–Њ–є –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –љ–∞–ґ–∞—В–Є–µ –њ–µ–і–∞–ї–Є –Є –њ–Њ—Б–ї–µ–і—Г—О—Й–µ–µ –Њ—В–њ—Г—Б–Ї–∞–љ–Є–µ. –°–љ—П—В–Є–µ —Б–Є–≥–љ–∞–ї–∞ —Б –Ї–Њ–љ—В–∞–Ї—В–∞ –°10: –Т–Ї–ї—О—З–Є—В—М –Ј–∞–ґ–Є–≥–∞–љ–Є–µ, –љ–∞–ґ–∞—В—М –љ–∞ –њ–µ–і–∞–ї—М –Є –Њ—В–њ—Г—Б—В–Є—В—М –µ—С. –Я–Њ–і—К—С–Љ –Є —Б–њ–∞–і —Б–Є–≥–љ–∞–ї–∞ –Ј–∞–≤–Є—Б—В–Є –Њ—В —Б–Ї–Њ—А–Њ—Б—В–Є, —Б –Ї–Њ—В–Њ—А–Њ–є –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –љ–∞–ґ–∞—В–Є–µ –њ–µ–і–∞–ї–Є –Є –њ–Њ—Б–ї–µ–і—Г—О—Й–µ–µ –Њ—В–њ—Г—Б–Ї–∞–љ–Є–µ. –Ш–Ј–Љ–µ—А–µ–љ–Є—П –і–Њ–ї–ґ–љ—Л –њ—А–Њ–≤–Њ–і–Є—В—М –і–≤–∞ —Б–њ–µ—Ж–Є–∞–ї–Є—Б—В–∞. –Ф–ї—П –Њ–і–љ–Њ–≥–Њ —З–µ–ї–Њ–≤–µ–Ї–∞ –Ј–∞—В—А—Г–і–љ–Є—В–µ–ї—М–љ–Њ, –Є —В—А–µ–±—Г–µ—В –±–Њ–ї—М—И–Њ–≥–Њ –≤—А–µ–Љ–µ–љ–Є —Б–љ—П—В–Є–µ —Б–Є–≥–љ–∞–ї–∞ –љ–∞ —Б–µ–љ—Б–Њ—А–љ–Њ–Љ –і–∞—В—З–Є–Ї–µ, –њ—А–Њ–≤–µ–і–µ–љ–Є–µ —А–∞–Ј–ї–Є—З–љ—Л—Е –њ—А–Њ–≤–µ—А–Њ—З–љ—Л—Е —Ж–Є–Ї–ї–Њ–≤ –Є –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–Є —Б –њ–Њ–Љ–Њ—Й—М—О –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞.
–І—В–Њ –љ–∞–і–Њ –Ј–љ–∞—В—М, –µ—Б–ї–Є –Ј–∞–≥–Њ—А–µ–ї–∞—Б—М –љ–∞–і–њ–Є—Б—М Check engine
–І—В–Њ –љ–∞–і–Њ –Ј–љ–∞—В—М, –µ—Б–ї–Є –Ј–∞–≥–Њ—А–µ–ї–∞—Б—М –љ–∞–і–њ–Є—Б—М Check engine

–Ш–Ј–≤–µ—Б—В–љ–Њ, —З—В–Њ —А–∞–±–Њ—В–Њ—Б–њ–Њ—Б–Њ–±–љ–Њ–µ —Б–Њ—Б—В–Њ—П–љ–Є–µ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П –Ј–∞–≤–Є—Б–Є—В –≤ –њ–µ—А–≤—Г—О –Њ—З–µ—А–µ–і—М –Њ—В —Б–Њ—Б—В–Њ—П–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї—П. –Ш–љ–Њ–≥–і–∞ –Њ–љ –≤—Л—Е–Њ–і–Є—В –Є–Ј —Б—В—А–Њ—П –Њ—В –љ–µ–њ—А–∞–≤–Є–ї—М–љ–Њ–є —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є–Є, –Є–љ–Њ–≥–і–∞ –њ–Њ –і—А—Г–≥–Є–Љ –њ—А–Є—З–Є–љ–∞–Љ. –Т —В–∞–Ї–Є—Е —Б–ї—Г—З–∞—П—Е –Љ—Л –Љ–Њ–ґ–µ–Љ –љ–∞–±–ї—О–і–∞—В—М –њ–Њ—П–≤–ї–µ–љ–Є–µ –Є–љ–і–Є–Ї–∞—Ж–Є–Є Check engine –љ–∞ –њ—А–Є–±–Њ—А–љ–Њ–є –њ–∞–љ–µ–ї–Є.
–Ы—Г—З—И–µ–µ —А–µ—И–µ–љ–Є–µ –≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ вАУ —Н—В–Њ –љ–µ–Ј–∞–Љ–µ–і–ї–Є—В–µ–ї—М–љ–Њ –Њ–±—А–∞—В–Є—В—М—Б—П –≤ –∞–≤—В–Њ—Б–µ—А–≤–Є—Б, –Њ–љ–Є –њ–µ—А–≤—Л–Љ –і–µ–ї–Њ–Љ –њ—А–Њ–Є–Ј–≤–µ–і—Г—В –Ї–Њ–Љ–њ—М—О—В–µ—А–љ—Г—О –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї—Г –≤–∞—И–µ–≥–Њ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –Э–Њ –µ—Б–ї–Є –≤—Л –≤—Б–µ –ґ–µ —А–µ—И–Є–ї–Є –њ–Њ–њ—А–Њ–±–Њ–≤–∞—В—М –њ–Њ–љ—П—В—М, –≤ —З–µ–Љ –њ—А–Њ–±–ї–µ–Љ–∞ —Б–∞–Љ–Њ—Б—В–Њ—П—В–µ–ї—М–љ–Њ, –љ–∞—И–Є —Б—В–∞—В—М–Є –Є–Љ–µ–љ–љ–Њ –і–ї—П –≤–∞—Б.
–§–Є–Ј–Є—З–µ—Б–Ї–Є–µ –њ–Њ–≤—А–µ–ґ–і–µ–љ–Є—П
–С–Њ–ї—М—И–Є–љ—Б—В–≤–Њ —Б–ї—Г—З–∞–µ–≤ –≤—Л—Е–Њ–і–∞ –і–≤–Є–≥–∞—В–µ–ї–Є –Є–Ј —Б—В—А–Њ—П —Б–≤—П–Ј–∞–љ—Л —Б –≥—А–∞–љ–Є—З–љ—Л–Љ –Є–Ј–љ–Њ—Б–Њ–Љ —Б–Є—Б—В–µ–Љ—Л –њ–Њ—А—И–љ–µ–є. –Т –Є—В–Њ–≥–µ –њ–∞–і–∞–µ—В –Љ–Њ—Й–љ–Њ—Б—В—М –Є –≤–Њ–Ј—А–∞—Б—В–∞–µ—В —В–Њ–њ–ї–Є–≤–љ—Л–є —А–∞—Б—Е–Њ–і. –Т–∞–ґ–љ–Њ, —З—В–Њ –і–≤–Є–≥–∞—В–µ–ї–Є, —А–∞–±–Њ—В–∞—О—Й–Є–µ –љ–∞ –і–Є–Ј–µ–ї—М–љ–Њ–Љ —В–Њ–њ–ї–Є–≤–µ –њ—А–Є–љ—Ж–Є–њ–Є–∞–ї—М–љ–Њ –Њ—В–ї–Є—З–љ—Л –Њ—В –Є—Б–њ–Њ–ї—М–Ј—Г—О—Й–Є—Е –±–µ–љ–Ј–Є–љ. –Э–∞–њ—А–Є–Љ–µ—А, –і–Є–Ј–µ–ї—М–љ—Л–µ –і–≤–Є–≥–∞—В–µ–ї–Є —З–∞—Й–µ —А–µ–Љ–Њ–љ—В–Є—А—Г—О—В –њ–Њ –њ—А–Є—З–Є–љ–µ –≤—Л—Е–Њ–і–∞ –Є–Ј —Б—В—А–Њ—П –њ–Њ—А—И–љ–µ–є, —В–∞–Ї –Ї–∞–Ї –Њ–љ–Є –Љ–Њ–≥—Г—В –њ—А–Њ–≥–Њ—А–∞—В—М. –Х—Б–ї–Є –≤–і—А—Г–≥ –≤—Л –Ј–∞–Љ–µ—В–Є–ї–Є –Њ–њ–Є—Б–∞–љ–љ—Л–µ –≤—Л—И–µ —Б–Є–Љ–њ—В–Њ–Љ—Л вАУ –±—Г–і—М—В–µ —Г–≤–µ—А–µ–љ—Л, –њ—А–Њ–±–ї–µ–Љ–∞ –Њ–Ї–∞–ґ–µ—В—Б—П –Є–Љ–µ–љ–љ–Њ –≤ —Д–Є–Ј–Є—З–µ—Б–Ї–Њ–Љ –њ–Њ–≤—А–µ–ґ–і–µ–љ–Є–Є –Љ–Њ—В–Њ—А–∞.
–Ь–∞—Б–ї–Њ –Є –≥–Њ—А—О—З–µ–µ
–Ф–ї—П –њ—А–∞–≤–Є–ї—М–љ–Њ–є —А–∞–±–Њ—В—Л –і–≤–Є–≥–∞—В–µ–ї—П –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Љ–∞—Б–ї–Њ. –Х–≥–Њ –љ–∞–і–Њ –≤—А–µ–Љ—П –Њ—В –≤—А–µ–Љ–µ–љ–Є –Ј–∞–Љ–µ–љ—П—В—М. –Т–Њ –≤—А–µ–Љ—П —А–∞–±–Њ—В—Л –Љ–µ—Е–∞–љ–Є–Ј–Љ–Њ–≤, –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є, –Ї–Њ—В–Њ—А—Л–µ –љ–∞—Е–Њ–і—П—В—Б—П –≤ —В—А–µ–љ–Є–Є –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є –±–µ–Ј –і–Њ—Б—В–∞—В–Њ—З–љ–Њ–є —Б–Љ–∞–Ј–Ї–Є –Њ—З–µ–љ—М –±—Л—Б—В—А–Њ –≤—Л—Е–Њ–і—П—В –Є–Ј —Б—В—А–Њ—П. –Э–Њ –Љ–∞—Б–ї–Њ –Є–Љ–µ–µ—В —Б–≤–Њ–є—Б—В–≤–Њ –Ј–∞–≥—А—П–Ј–љ—П—В—М—Б—П. –Ґ–Њ–≥–і–∞ –і–µ—В–∞–ї–Є, –±—Г–і—Г—З–Є –і–∞–ґ–µ –Њ–±–Є–ї—М–љ–Њ —Б–Љ–∞–Ј–∞–љ–љ—Л–µ, –Є–Ј–љ–∞—И–Є–≤–∞—О—В—Б—П –µ—Й–µ –±—Л—Б—В—А–µ–µ. –Т —А–µ–Ј—Г–ї—М—В–∞—В–µ –Љ–Њ–ґ–љ–Њ –Њ–ґ–Є–і–∞—В—М –і–∞–ґ–µ –Ј–∞–Ї–ї–Є–љ–Є–≤–∞–љ–Є–µ –і–≤–Є–≥–∞—В–µ–ї—П, —З—В–Њ –њ—А–µ–і–њ–Њ–ї–∞–≥–∞–µ—В –њ—А–Њ–≤–µ–і–µ–љ–Є–µ –і–Њ—А–Њ–≥–Њ—Б—В–Њ—П—Й–µ–≥–Њ –Ї–∞–њ–Є—В–∞–ї—М–љ–Њ–≥–Њ —А–µ–Љ–Њ–љ—В–∞. –Р–≤—В–Њ–Љ–Њ–±–Є–ї–Є—Б—В—Г –≤–∞–ґ–љ–Њ –њ–Њ–Љ–љ–Є—В—М, —З—В–Њ –љ–µ–і–Њ—Б—В–∞—З–∞ –Љ–∞—Б–ї–∞ –њ–Њ—З—В–Є –≤—Б–µ–≥–і–∞ –њ—А–Є–≤–Њ–і–Є—В –Ї —Б–µ—А—М–µ–Ј–љ–Њ–є –њ–Њ–ї–Њ–Љ–Ї–µ –і–≤–Є–≥–∞—В–µ–ї—П. –Ш –µ—Б–ї–Є –≤–∞—И–∞ –Љ–∞—И–Є–љ–∞ –Ј–∞–≥–ї–Њ—Е–ї–∞ вАУ —Н—В–Њ –µ—Й–µ –љ–µ —Е—Г–і—И–Є–є –≤–∞—А–Є–∞–љ—В. –Х—Б–ї–Є —Б–ї—Г—З–Є–ї–∞—Б—М —В–∞–Ї–∞—П —Б–Є—В—Г–∞—Ж–Є—П, –љ–∞–і–Њ –њ–Њ–і–Њ–ґ–і–∞—В—М –њ–Њ–Ї–∞ –Љ–Њ—В–Њ—А –Њ—Б—В—Л–љ–µ—В, –Є –њ—А–Њ–≤–µ—А–Є—В—М —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л–Љ —Й—Г–њ–Њ–Љ —Г—А–Њ–≤–µ–љ—М –≤ –Љ–∞—Б–ї—П–љ–Њ–Љ –±–∞—З–Ї–µ. –Х—Й–µ –Њ–і–љ–Њ–є –Њ—И–Є–±–Ї–Њ–є –Љ–Њ–ґ–µ—В —Б—В–∞—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –љ–µ–Ї–∞—З–µ—Б—В–≤–µ–љ–љ–Њ–≥–Њ –і–µ—И–µ–≤–Њ–≥–Њ –Љ–∞—Б–ї–∞. –Т —В–∞–Ї–Њ–Љ —Б–ї—Г—З–∞–µ –≤–Є–і–Є–Љ–∞—П –Є–љ–і–Є–Ї–∞—Ж–Є—П –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є —В–Њ–ґ–µ –љ–µ–њ—А–µ–Љ–µ–љ–љ–Њ –і–∞—Б—В –Њ —Б–µ–±–µ –Ј–љ–∞—В—М. –І–∞—Б—В–Њ –±—Л–≤–∞–µ—В —В—А—Г–і–љ–Њ –Ј–∞–≤–µ—Б—В–Є –Љ–Њ—В–Њ—А –њ—А–Є —Б–Є–ї—М–љ–Њ–Љ –Љ–Њ—А–Њ–Ј–µ. –≠—В–Њ —Б–≤—П–Ј–∞–љ–Њ —Б –њ–Њ–≤—Л—И–µ–љ–Є–µ–Љ –≤—П–Ј–Ї–Њ—Б—В–Є –Љ–∞—Б–ї–∞, –Њ—Б–Њ–±–µ–љ–љ–Њ –Љ–Є–љ–µ—А–∞–ї—М–љ–Њ–≥–Њ. –Ы—Г—З—И–µ –Њ—В–Ї–∞–Ј–∞—В—М—Б—П –Њ—В —В–∞–Ї–Њ–≥–Њ –Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М —Б–Є–љ—В–µ—В–Є—З–µ—Б–Ї–Њ–µ, –Њ–љ–Њ —Г–≤–µ—А–µ–љ–љ–µ–µ —Б–њ—А–∞–≤–ї—П–µ—В—Б—П —Б –њ–µ—А–µ–њ–∞–і–∞–Љ–Є —В–µ–Љ–њ–µ—А–∞—В—Г—А. –Т–ї–∞–і–µ–ї—М—Ж–∞–Љ –і–Є–Ј–µ–ї—М–љ—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є –≤–∞–ґ–љ–Њ –њ–Њ–Љ–љ–Є—В—М, —З—В–Њ –Љ–∞–ї–µ–є—И–Є–µ –њ—А–Є–Љ–µ—Б–Є –≤ —В–Њ–њ–ї–Є–≤–µ –Љ–Њ–≥—Г—В –њ—А–Є–≤–µ—Б—В–Є –Ї –њ–Њ–ї–Њ–Љ–Ї–µ –љ–∞—Б–Њ—Б–∞ –Є –≤—Л–≤–µ—Б—В–Є –Є–Ј —Б—В—А–Њ—П —Д–Њ—А—Б—Г–љ–Ї–Є. –Т–Њ–Ј–Љ–Њ–ґ–љ–Њ, –≤ —В–Њ–њ–ї–Є–≤–љ—Л–є –±–∞—З–Њ–Ї –њ–Њ–њ–∞–ї –Љ—Г—Б–Њ—А, —В–Њ–≥–і–∞ –њ–µ—А–≤—Л–Љ –Є–Ј —Б—В—А–Њ—П —В–∞–Ї–ґ–µ –≤—Л–є–і–µ—В –Є–Љ–µ–љ–љ–Њ –љ–∞—Б–Њ—Б –Є –њ–Њ—П–≤–Є—В—Б—П –Є–љ–і–Є–Ї–∞—Ж–Є—П Check engine.
–†–µ–ґ–Є–Љ —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є–Є –Є –њ—А–Њ—З–Є–µ —Д–∞–Ї—В–Њ—А—Л
–Т–∞–ґ–љ–Њ –њ–Њ–Љ–љ–Є—В—М, —З—В–Њ –µ—Б–ї–Є –≤–Њ–і–Є—В–µ–ї—М –њ–Њ—Б—В–Њ—П–љ–љ–Њ —Б–ї–Є—И–Ї–Њ–Љ –±—Л—Б—В—А–Њ —А–∞–Ј–≥–Њ–љ—П–µ—В—Б—П –Є —А–µ–Ј–Ї–Њ –Њ—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П вАУ —Н—В–Њ –њ—А–Є–≤–Њ–і–Є—В –Ї –±—Л—Б—В—А–Њ–Љ—Г –Є–Ј–љ–Њ—Б—Г –і–µ—В–∞–ї–µ–є –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –Э–Њ –Ї–Њ–≥–і–∞ –Љ–Њ—В–Њ—А –±–Њ–ї—М—И—Г—О —З–∞—Б—В—М –≤—А–µ–Љ–µ–љ–Є –±—Г–і–µ—В —Д—Г–љ–Ї—Ж–Є–Њ–љ–Є—А–Њ–≤–∞—В—М –≤ –Њ–і–љ–Њ–Љ —А–µ–ґ–Є–Љ–µ, —В–∞–Ї–∞—П —Б—В–∞–±–Є–ї—М–љ–Њ—Б—В—М –њ–Њ–ї–Њ–ґ–Є—В–µ–ї—М–љ–Њ —Б–Ї–∞–ґ–µ—В—Б—П –љ–∞ —Б—А–Њ–Ї–µ –µ–≥–Њ –ґ–Є–Ј–љ–Є. –Ъ —З–Є—Б–ї—Г –Њ—Б–Њ–±–µ–љ–љ–Њ –љ–µ–њ—А–Є—П—В–љ—Л—Е –њ—А–Є—З–Є–љ –њ–Њ–ї–Њ–Љ–Ї–Є –Ф–Т–° —Б—В–Њ–Є—В –і–Њ–±–∞–≤–Є—В—М –љ–µ–Ї–∞—З–µ—Б—В–≤–µ–љ–љ–Њ–µ —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–µ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є–µ –љ–∞ —Б—В–∞–љ—Ж–Є—П—Е. –°—А–∞–Ј—Г –Ј–∞–Љ–µ—В–Є—В—М —Н—В–Њ –±—Л–≤–∞–µ—В –Њ—З–µ–љ—М —В—А—Г–і–љ–Њ, –љ–Њ —Г–ґ–µ –њ–Њ—Б–ї–µ –њ–µ—А–≤–Њ–є —В—Л—Б—П—З–Є –Ї–Є–ї–Њ–Љ–µ—В—А–Њ–≤ –Ј–∞–≥–Њ—А–∞–µ—В—Б—П —Б–≤–Є–і–µ—В–µ–ї—М—Б—В–≤—Г—О—Й–∞—П –Њ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –ї–∞–Љ–њ–Њ—З–Ї–∞. –Т —В–∞–Ї–Њ–Љ —Б–ї—Г—З–∞–µ –≤ –њ–µ—А–≤—Г—О –Њ—З–µ—А–µ–і—М –љ—Г–ґ–љ–Њ –Њ–±—А–∞—В–Є—В—М –≤–љ–Є–Љ–∞–љ–Є–µ –љ–∞ —В–µ–Љ–њ–µ—А–∞—В—Г—А—Г –і–≤–Є–≥–∞—В–µ–ї—П, –Њ–љ –Љ–Њ–≥ –±–∞–љ–∞–ї—М–љ–Њ –њ–µ—А–µ–≥—А–µ—В—М—Б—П. –Ш–љ–Њ–≥–і–∞ –њ—А–Њ–±–ї–µ–Љ–∞ –Ї—А–Њ–µ—В—Б—П –≤ —Б–Є—Б—В–µ–Љ–µ –Њ—Е–ї–∞–ґ–і–µ–љ–Є—П, –Љ–Њ–≥—Г—В —В—А–µ—Б–љ—Г—В—М –Њ—В —Б—В–∞—А–Њ—Б—В–Є —И–ї–∞–љ–≥–Є. –≠—В–Њ –њ—А–Є–≤–Њ–і–Є—В –Ї –њ–Њ—В–µ—А—П–Љ –∞–љ—В–Є—Д—А–Є–Ј–∞ –Є –њ–Њ—Б–ї–µ–і—Г—О—Й–µ–Љ—Г –њ–µ—А–µ–≥—А–µ–≤—Г –і–≤–Є–≥–∞—В–µ–ї—П. –С—Л–≤–∞–µ—В, —З—В–Њ –≤—Б–ї–µ–і—Б—В–≤–Є–µ –њ–Њ–њ–∞–і–∞–љ–Є—П –≤–Њ–і—Л –≤ —Ж–Є–ї–Є–љ–і—А —Б–ї—Г—З–∞–µ—В—Б—П —В–∞–Ї –љ–∞–Ј—Л–≤–∞–µ–Љ—Л–є –≥–Є–і—А–Њ—Г–і–∞—А. –Х—Б–ї–Є –ґ–Є–і–Ї–Њ—Б—В—М —З–µ—А–µ–Ј –≤–Њ–Ј–і—Г—И–љ—Л–є —Д–Є–ї—М—В—А –і–Њ—Е–Њ–і–Є—В –і–Њ —Ж–Є–ї–Є–љ–і—А–∞, —В–Њ –і–≤–Є–≥–∞—В–µ–ї—М —А–µ–Ј–Ї–Њ –Њ—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П –Є –љ–∞ –њ–∞–љ–µ–ї–Є –њ—А–Є–±–Њ—А–Њ–≤ –Љ—Л –≤–Є–і–Є–Љ –љ–∞–і–њ–Є—Б—М Check engine.
–Ч–∞–Ї–ї—О—З–µ–љ–Є–µ
–Э–µ–Њ–њ—Л—В–љ—Л–Љ –∞–≤—В–Њ–ї—О–±–Є—В–µ–ї–µ–Љ —Б–ї–Њ–ґ–љ–Њ –Њ—В—А–µ–Љ–Њ–љ—В–Є—А–Њ–≤–∞—В—М –і–≤–Є–≥–∞—В–µ–ї—М —Б–∞–Љ–Є–Љ. –Э–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М –њ—А–Є—З–Є–љ—Г –Ј–∞–≥–Њ—А–∞–љ–Є—П —В—А–µ–≤–Њ–ґ–љ–Њ–є –љ–∞–і–њ–Є—Б–Є Check engine –љ–µ —В–∞–Ї —Б–ї–Њ–ґ–љ–Њ. –Я–Њ–Љ–љ–Є—В–µ —Б—В–∞—А–Њ–µ, –Ї–∞–Ї –Љ–Є—А, –њ—А–∞–≤–Є–ї–Њ: –њ—А–Њ—Д–Є–ї–∞–Ї—В–Є–Ї–∞ –≤—Б–µ–≥–і–∞ –ї—Г—З—И–µ –ї–µ—З–µ–љ–Є—П! –Э–∞ –љ–∞—И–µ–Љ –°–Ґ–Ю –Љ–Њ–ґ–љ–Њ —Б–і–µ–ї–∞—В—М –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї—Г –Т–∞—И–µ–≥–Њ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П.
–Ф–∞—В—З–Є–Ї–Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –љ–∞–ї–Є—З–Є—П –њ–∞—Б—Б–∞–ґ–Є—А–∞
–Ф–∞—В—З–Є–Ї–Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –љ–∞–ї–Є—З–Є—П –њ–∞—Б—Б–∞–ґ–Є—А–∞ –љ–∞ –њ–Њ—Б–∞–і–Њ—З–љ–Њ–Љ –Љ–µ—Б—В–µ

–Я—А–Є–Љ–µ–љ–µ–љ–Є–µ –° 2004 –≥–Њ–і–∞ –≤ –°–®–Р –і–µ–є—Б—В–≤—Г–µ—В –љ–Њ—А–Љ–∞ NHTSA FMVSS-208 (National Highway Traffic Safety Administration; Federal Motor Vehicle Safety Standards and Regulations 208). –≠—В–∞ –љ–Њ—А–Љ–∞ –±—Л–ї–∞ –≤–≤–µ–і–µ–љ–∞ –і–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л –њ—А–µ–і–Њ—В–≤—А–∞—В–Є—В—М –Є–ї–Є —Б–љ–Є–Ј–Є—В—М —А–Є—Б–Ї –њ–Њ–ї—Г—З–µ–љ–Є—П –і–µ—В—М–Љ–Є —В—А–∞–≤–Љ –Њ—В —Б—А–∞–±–∞—В—Л–≤–∞–љ–Є—П –њ–Њ–і—Г—И–µ–Ї –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є –≤ —Б–ї—Г—З–∞–µ, –µ—Б–ї–Є –Њ–љ–Є —Б–Є–і—П—В –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ –њ–∞—Б—Б–∞–ґ–Є—А—Б–Ї–Њ–Љ —Б–Є–і–µ–љ–Є–Є. –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –љ–∞–ї–Є—З–Є—П –њ–∞—Б—Б–∞–ґ–Є—А–∞ –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Б–Є–і–µ–љ–Є–Є –њ—Г—В–µ–Љ –Є–Ј–Љ–µ—А–µ–љ–Є—П –µ–≥–Њ –≤–µ—Б–∞ –њ–Њ–Ј–≤–Њ–ї—П–µ—В —Ж–µ–ї–µ–љ–∞–њ—А–∞–≤–ї–µ–љ–љ–Њ –Њ—В–Ї–ї—О—З–∞—В—М –њ–Њ–і—Г—И–Ї—Г –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є, –µ—Б–ї–Є –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Б–Є–і–µ–љ–Є–Є —Б–Є–і–Є—В —А–µ–±–µ–љ–Њ–Ї. –Я—А–Є–±–Њ—А —Г–њ—А–∞–≤–ї–µ–љ–Є—П, —В–∞–Ї–ґ–µ –≤—Б—В—А–Њ–µ–љ–љ—Л–є –≤ —Б–Є–і–µ–љ—М–µ, –њ—А–Є–љ–Є–Љ–∞–µ—В –њ–Њ–Ї–∞–Ј–∞–љ–Є—П —З–µ—В—Л—А–µ—Е –∞–љ–∞–ї–Њ–≥–Њ–≤—Л—Е —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є—Е —Б–Є–≥–љ–∞–ї–Њ–≤ –≤–Ј–≤–µ—И–Є–≤–∞–љ–Є—П –Є –њ–µ—А–µ–і–∞–µ—В —А–µ–Ј—Г–ї—М—В–∞—В –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –љ–∞ –њ—А–Є–±–Њ—А —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ–Њ–і—Г—И–Ї–Њ–є –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є. –°—В—А—Г–Ї—В—Г—А–∞ –Є –њ—А–Є–љ—Ж–Є–њ –і–µ–є—Б—В–≤–Є—П –Я—А–Є–љ—Ж–Є–њ –і–µ–є—Б—В–≤–Є—П –і–∞—В—З–Є–Ї–∞ iBoltвДҐ –Њ—Б–љ–Њ–≤—Л–≤–∞–µ—В—Б—П –љ–∞ –Є–Ј–Љ–µ—А–µ–љ–Є–Є –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П —В—А–∞–≤–µ—А—Б—Л –Ј–∞ —Б—З–µ—В —Б–Є–ї—Л –≤–µ—Б–∞ –њ–∞—Б—Б–∞–ґ–Є—А–∞ –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Б–Є–і–µ–љ—М–µ. –Т—Л—Б–Њ—В–∞ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П —Б—З–Є—В—Л–≤–∞–µ—В—Б—П –њ—Г—В–µ–Љ –Є–Ј–Љ–µ—А–µ–љ–Є—П —Б–Є–ї—Л –Љ–∞–≥–љ–Є—В–љ–Њ–≥–Њ –њ–Њ–ї—П –≤ —Б–њ–µ—Ж–Є–∞–ї—М–љ–Њ–Љ –і–∞—В—З–Є–Ї–µ –•–Њ–ї–ї–∞ / –њ–Њ–ї–Њ–ґ–µ–љ–Є–Є –Љ–∞–≥–љ–Є—В–∞ .
–Ф–∞—В—З–Є–Ї iBoltвДҐ —Б–Ї–Њ–љ—Б—В—А—Г–Є—А–Њ–≤–∞–љ —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —З—В–Њ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ —В—А–∞–≤–µ—А—Б—Л –≤—Л–Ј—Л–≤–∞—О—В –≤ –Њ—Б–љ–Њ–≤–љ–Њ–Љ z-–Ї–Њ–Љ–њ–Њ–љ–µ–љ—В—Л –≤–µ—Б–∞ –њ–∞—Б—Б–∞–ґ–Є—А–∞ –њ–µ—А–µ–і–љ–µ–≥–Њ —Б–Є–і–µ–љ—М—П. –°–Є—Б—В–µ–Љ–∞ –Ї–Њ–Њ—А–і–Є–љ–∞—В –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П –Њ–њ—А–µ–і–µ–ї—П–µ—В —Е-–Њ—Б—М –њ–Њ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—О –і–≤–Є–ґ–µ–љ–Є—П, –Њ—Б–Є z –Є —Г –≤–µ—А—В–Є–Ї–∞–ї—М–љ–Њ –Є –≥–Њ—А–Є–Ј–Њ–љ—В–∞–ї—М–љ–Њ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –µ–µ. –†–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –Љ–∞–≥–љ–Є—В–∞ –Є –Є–љ—В–µ–≥—А–∞–ї—М–љ–Њ–є –Љ–Є–Ї—А–Њ—Б—Е–µ–Љ—Л –•–Њ–ї–ї–∞ –≤ –і–∞—В—З–Є–Ї–µ –≤—Л–±—А–∞–љ–Њ —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —З—В–Њ–±—Л —Б—В–∞—В–Є—З–љ–Њ–µ –Љ–∞–≥–љ–Є—В–љ–Њ–µ –њ–Њ–ї–µ, –њ—А–Њ—Е–Њ–і—П—Й–µ–µ —З–µ—А–µ–Ј –Є–љ—В–µ–≥—А–∞–ї—М–љ—Г—О –Љ–Є–Ї—А–Њ—Б—Е–µ–Љ—Г –•–Њ–ї–ї–∞, —Б–Њ–Ј–і–∞–≤–∞–ї–Њ –ї–Є–љ–µ–є–љ—Л–є —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–є —Б–Є–≥–љ–∞–ї –і–ї—П –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П —В—А–∞–≤–µ—А—Б—Л. –Ю—Б–Њ–±—Л–є –і–Є–Ј–∞–є–љ –і–∞—В—З–Є–Ї–∞ iBoltвДҐ –њ—А–µ–њ—П—В—Б—В–≤—Г–µ—В –≥–Њ—А–Є–Ј–Њ–љ—В–∞–ї—М–љ–Њ–Љ—Г –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—О –Є–љ—В–µ–≥—А–∞–ї—М–љ–Њ–є –Љ–Є–Ї—А–Њ—Б—Е–µ–Љ—Л –•–Њ–ї–ї–∞ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –Љ–∞–≥–љ–Є—В–∞, —З—В–Њ–±—Л —Б–і–µ—А–ґ–Є–≤–∞—В—М –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ –њ–Њ–њ–µ—А–µ—З–љ—Л—Е —Б–Є–ї –Є –Љ–Њ–Љ–µ–љ—В–Њ–≤. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–µ –љ–∞–њ—А—П–ґ–µ–љ–Є–µ –≤ —В—А–∞–≤–µ—А—Б–µ –Њ–≥—А–∞–љ–Є—З–Є–≤–∞–µ—В—Б—П –Ј–∞ —Б—З–µ—В —В–µ—Е–∞–љ–Є—З–µ—Б–Ї–Њ–≥–Њ –Њ–≥—А–∞–љ–Є—З–Є—В–µ–ї—П –њ–µ—А–µ–≥—А—Г–Ј–Ї–Є . –Ю–љ –Ј–∞—Й–Є—Й–∞–µ—В –і–∞—В—З–Є–Ї iBoltвДҐ –≤ –њ–µ—А–≤—Г—О –Њ—З–µ—А–µ–і—М –Њ—В –њ–µ—А–µ–≥—А—Г–Ј–Њ–Ї –≤ —Б–ї—Г—З–∞–µ –∞–≤–∞—А–Є–Є.
–Э–∞—Б—В—А–Њ–є–Ї–∞
–Т –ї–Є–љ–µ–є–љ–Њ–Љ –і–∞—В—З–Є–Ї–µ –•–Њ–ї–ї–∞, —А–∞–±–Њ—В–∞—О—Й–µ–Љ –њ–Њ –њ—А–Є–љ—Ж–Є–њ—Г ¬ЂSpinning Current¬ї, –Љ–Њ–ґ–љ–Њ –љ–∞—Б—В—А–∞–Є–≤–∞—В—М —З—Г–≤—Б—В–≤–Є—В–µ–ї—М–љ–Њ—Б—В—М, —Б–Љ–µ—Й–µ–љ–Є–µ –Є —В–µ–Љ–њ–µ—А–∞—В—Г—А–љ—Л–µ –Є–Ј–Љ–µ–љ–µ–љ–Є—П —З—Г–≤—Б—В–≤–Є—В–µ–ї—М–љ–Њ—Б—В–Є. –Ф–∞–љ–љ—Л–µ –љ–∞—Б—В—А–Њ–є–Ї–Є —Б–Њ—Е—А–∞–љ—П—О—В—Б—П –≤ EEPROM, –≤—Б—В—А–Њ–µ–љ–љ–Њ–Љ –≤ –њ–Њ–і–ї–Њ–ґ–Ї–µ –і–∞—В—З–Є–Ї–∞ –•–Њ–ї–ї–∞.
–Ы–Є–љ–µ–є–љ–Њ—Б—В—М –≤—Л—Е–Њ–і–љ–Њ–≥–Њ —Б–Є–≥–љ–∞–ї–∞
–Ы–Є–љ–µ–є–љ—Л–є –≤—Л—Е–Њ–і–љ–Њ–є —Б–Є–≥–љ–∞–ї –њ–Њ–ї—Г—З–∞—О—В –±–ї–∞–≥–Њ–і–∞—А—П –Њ–і–љ–Њ–є –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є–Њ–љ–љ–Њ–є –Њ—Б–Њ–±–µ–љ–љ–Њ—Б—В–Є. –°–Є–ї–∞, –Ї–Њ—В–Њ—А—Г—О —Б–Њ–Ј–і–∞–µ—В –≤–µ—Б –њ–∞—Б—Б–∞–ґ–Є—А–∞ –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Б–Є–і–µ–љ–Є–Є, –њ–µ—А–µ–і–∞–µ—В—Б—П —Б –≤–µ—А—Е–љ–µ–є —Б—В—А—Г–Ї—В—Г—А—Л —Б–Є–і–µ–љ—М—П —З–µ—А–µ–Ј –≥–Є–ї—М–Ј—Г –љ–∞ —В—А–∞–≤–µ—А—Б—Г . –° —В—А–∞–≤–µ—А—Б—Л —Б–Є–ї–∞ –њ–Њ—Б—В—Г–њ–∞–µ—В –≤ –љ–Є–ґ–љ—О—О —Б—В—А—Г–Ї—В—Г—А—Г —Б–Є–і–µ–љ—М—П. –Ґ—А–∞–≤–µ—А—Б–∞ —Б–Ї–Њ–љ—Б—В—А—Г–Є—А–Њ–≤–∞–љ–∞ –≤ –≤–Є–і–µ –і–≤–Њ–є–љ–Њ–є —В—А–∞–≤–µ—А—Б—Л, –њ–Њ—Б–Ї–Њ–ї—М–Ї—Г –Є–Љ–µ–µ—В S-–Њ–±—А–∞–Ј–љ—Г—О –ї–Є–љ–Є—О –і–µ—Д–Њ—А–Љ–∞—Ж–Є–Є. –Я—А–Є —Н—В–Њ–Љ –Њ–±–µ –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Л–µ —В–Њ—З–Ї–Є —Б–Њ–њ—А—П–ґ–µ–љ–Є—П –і–≤–Њ–є–љ–Њ–є —В—А–∞–≤–µ—А—Б—Л –Њ—Б—В–∞—О—В—Б—П –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Л–Љ–Є –њ–Њ –≤—Б–µ–Љ—Г –і–Є–∞–њ–∞–Ј–Њ–љ—Г –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П. –≠—В–Њ –≥–∞—А–∞–љ—В–Є—А—Г–µ—В –ї–Є–љ–µ–є–љ–Њ–µ –Є –њ–∞—А–∞–ї–ї–µ–ї—М–љ–Њ–µ –і–≤–Є–ґ–µ–љ–Є–µ –Є–љ—В–µ–≥—А–∞–ї—М–љ–Њ–є –Љ–Є–Ї—А–Њ—Б—Е–µ–Љ—Л –•–Њ–ї–ї–∞ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –Љ–∞–≥–љ–Є—В–∞, –±–ї–∞–≥–Њ–і–∞—А—П —З–µ–Љ—Г —Б–Њ–Ј–і–∞–µ—В—Б—П –ї–Є–љ–µ–є–љ—Л–є –≤—Л—Е–Њ–і–љ–Њ–є —Б–Є–≥–љ–∞–ї.
–°–Є–Љ–Љ–µ—В—А–Є—З–љ—Л–є –і–Є–∞–њ–∞–Ј–Њ–љ –Є–Ј–Љ–µ—А–µ–љ–Є–є
–Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ—Л—Е —Б–Є–і–µ–љ–Є–є –њ–Њ–Ї–∞–Ј–∞–ї–Њ, —З—В–Њ –љ–∞ –і–∞—В—З–Є–Ї–Є –Љ–Њ–≥—Г—В –≤–Њ–Ј–і–µ–є—Б—В–≤–Њ–≤–∞—В—М –Ї–∞–Ї –њ–Њ–ї–Њ–ґ–Є—В–µ–ї—М–љ—Л–µ, —В–∞–Ї –Є –Њ—В—А–Є—Ж–∞—В–µ–ї—М–љ—Л–µ —Б–Є–ї—Л. –≠—В–Њ–Љ—Г –µ—Б—В—М –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –њ—А–Є—З–Є–љ: –≤–Њ-–њ–µ—А–≤—Л—Е, –Њ—В—А–Є—Ж–∞—В–µ–ї—М–љ—Л–µ —Б–Є–ї—Л –Љ–Њ–≥—Г—В –≤–Њ–Ј–і–µ–є—Б—В–≤–Њ–≤–∞—В—М –љ–∞ –Њ–і–Є–љ –Є–Ј –і–∞—В—З–Є–Ї–Њ–≤, –Њ–љ–Є –Љ–Њ–≥—Г—В –±—Л—В—М –≤—Л–Ј–≤–∞–љ—Л –њ—А–µ–і–≤–∞—А–Є—В–µ–ї—М–љ—Л–Љ –љ–∞—В—П–ґ–µ–љ–Є–µ–Љ (—Б–Љ–µ—Й–µ–љ–Є–µ–Љ), —П–≤–ї—П—О—Й–Є–Љ—Б—П —А–µ–Ј—Г–ї—М—В–∞—В–Њ–Љ –і–Њ–њ—Г—Б–Ї–Њ–≤ –љ–∞ –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—О —Б–Є–і–µ–љ—М—П –Є –Љ–Њ–љ—В–∞–ґ —Б–Є–і–µ–љ—М—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ. –Т–Њ-–≤—В–Њ—А—Л—Е, –Њ—В—А–Є—Ж–∞—В–µ–ї—М–љ—Л–µ —Б–Є–ї—Л –≤–Њ–Ј–і–µ–є—Б—В–≤—Г—О—В –љ–∞ –Њ—В–і–µ–ї—М–љ—Л–µ –і–∞—В—З–Є–Ї–Є –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В —А–∞—Б–њ—А–µ–і–µ–ї–µ–љ–Є—П —Б–Є–ї—Л –≤ —Б–≤—П–Ј–Є —Б –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ–Љ —Б–Є–і—П—Й–µ–≥–Њ, —З—В–Њ —В–∞–Ї–ґ–µ —Б–≤—П–Ј–∞–љ–Њ —Б –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ–Љ —Б–њ–Є–љ–Ї–Є —Б–Є–і–µ–љ—М—П. –Я–Њ—Н—В–Њ–Љ—Г –і–Є–∞–њ–∞–Ј–Њ–љ –Є–Ј–Љ–µ—А–µ–љ–Є–є –і–∞—В—З–Є–Ї–∞ iBoltвДҐ —А–∞—Б—Б—З–Є—В–∞–љ —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —З—В–Њ–±—Л —Б–Є–ї—Л –Љ–Њ–≥–ї–Є –Њ–њ—А–µ–і–µ–ї—П—В—М—Б—П –Ї–∞–Ї –≤ –њ–Њ–ї–Њ–ґ–Є—В–µ–ї—М–љ–Њ–Љ, —В–∞–Ї –Є –≤ –Њ—В—А–Є—Ж–∞—В–µ–ї—М–љ–Њ–Љ –њ–Њ–ї–Њ–ґ–µ–љ–Є–Є z. –≠—В–Њ –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–і–љ–Њ–Ј–љ–∞—З–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М –≤–µ—Б –њ–∞—Б—Б–∞–ґ–Є—А–∞ –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Б–Є–і–µ–љ—М–µ. –С–ї–∞–≥–Њ–і–∞—А—П —Б–Є–Љ–Љ–µ—В—А–Є—З–љ–Њ–Љ—Г –і–Є–∞–њ–∞–Ј–Њ–љ—Г –Є–Ј–Љ–µ—А–µ–љ–Є–є –і–∞—В—З–Є–Ї iBoltвДҐ –Њ–њ—А–µ–і–µ–ї—П–µ—В —Б–Є–ї—Г –љ–∞–ґ–Є–Љ–∞ (–і–∞–≤–ї–µ–љ–Є—П) –Є —А–∞—Б—В—П–≥–Є–≤–∞—О—Й–µ–µ —Г—Б–Є–ї–Є–µ —Б –Њ–і–Є–љ–∞–Ї–Њ–≤–Њ–є —З—Г–≤—Б—В–≤–Є—В–µ–ї—М–љ–Њ—Б—В—М—О –Є –Њ–і–Є–љ–∞–Ї–Њ–≤—Л–Љ–Є –і–Њ–њ—Г—Б–Ї–∞–Љ–Є. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –Љ—Л –Љ–Њ–ґ–µ–Љ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –Њ–і–љ–Є –Є —В–µ –ґ–µ –і–∞—В—З–Є–Ї–Є –≤ –Њ–±–Њ–Є—Е –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Л—Е –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П—Е —Г—Б—В–∞–љ–Њ–≤–Ї–Є –і–ї—П –≤—Б–µ—Е –Љ–µ—Б—В —Б–Њ–њ—А—П–ґ–µ–љ–Є–є –≤–µ—А—Е–љ–µ–є –Є –љ–Є–ґ–љ–µ–є —Б—В—А—Г–Ї—В—Г—А—Л —Б–Є–і–µ–љ—М—П.
–Ю–њ–Є—Б–∞–љ–Є–µ –і–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Њ–≥–Њ —А–∞–Ј—К–µ–Љ–∞ OBD2 + –Ї–Њ–і—Л OBD II
–Ю–њ–Є—Б–∞–љ–Є–µ –і–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Њ–≥–Њ —А–∞–Ј—К–µ–Љ–∞ OBD2 + –Ї–Њ–і—Л OBD II

–Ю—З–µ–љ—М –≤–∞–ґ–љ–Њ, —З—В–Њ –љ–∞–ї–Є—З–Є–µ –∞–љ–∞–ї–Њ–≥–Є—З–љ–Њ–≥–Њ —А–∞–Ј—К–µ–Љ–∞ –љ–µ —П–≤–ї—П–µ—В—Б—П 100 –њ—А–Њ—Ж–µ–љ—В–љ—Л–Љ –њ—А–Є–Ј–љ–∞–Ї–Њ–Љ —Б–Њ–≤–Љ–µ—Б—В–Є–Љ–Њ—Б—В–Є —Б OBD-II. –Р–≤—В–Њ–Љ–Њ–±–Є–ї–Є –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–љ—Л–µ —Н—В–Њ–є —Б–Є—Б—В–µ–Љ–Њ–є –Њ–±—П–Ј–∞—В–µ–ї—М–љ–Њ –і–Њ–ї–ґ–љ—Л –Є–Љ–µ—В—М –Њ—В–Љ–µ—В–Ї—Г –љ–∞ –Њ–і–љ–Њ–є –Є–Ј —В–∞–±–ї–Є—З–µ–Ї –≤ –њ–Њ–і–Ї–∞–њ–Њ—В–љ–Њ–Љ –њ—А–Њ—Б—В—А–∞–љ—Б—В–≤–µ –Є/–Є–ї–Є –≤ —Б–Њ–њ—А–Њ–≤–Њ–і–Є—В–µ–ї—М–љ–Њ–є –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є–Є. –І–∞—Й–µ –≤—Б–µ–≥–Њ –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л–є –њ—А–Њ—В–Њ–Ї–Њ–ї –Љ–Њ–ґ–љ–Њ –Є–і–µ–љ—В–Є—Д–Є—Ж–Є—А–Њ–≤–∞—В—М –њ–Њ –љ–∞–ї–Є—З–Є—О/–Њ—В—Б—Г—В—Б—В–≤–Є—О –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л—Е –Ї–Њ–љ—В–∞–Ї—В–Њ–≤ –љ–∞ –і–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Њ–Љ —А–∞–Ј—К–µ–Љ–µ. –Х—Б–ї–Є –љ–∞ —Н—В–Њ–Љ —А–∞–Ј—К–µ–Љ–µ –њ—А–Є—Б—Г—В—Б—В–≤—Г—О—В –≤—Б–µ –Ї–Њ–љ—В–∞–Ї—В—Л, —Б–ї–µ–і—Г–µ—В –Њ–±—А–∞—В–Є—В—М—Б—П –Ї —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–є –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є–Є –љ–∞ –Ї–Њ–љ–Ї—А–µ—В–љ—Л–є –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М, –Ї–Њ—В–Њ—А–∞—П –µ—Б—В—М –љ–∞ —Б–∞–є—В–µ.
–Ф–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Є–є –Ї–Њ–љ–љ–µ–Ї—В–Њ—А OBD II
–Ю–±–Њ–Ј–љ–∞—З–µ–љ–Є–µ –Ї–Њ–љ—В–∞–Ї—В–Њ–≤ OEM J1850 –®–Є–љ–∞+ (Bus + Line, SAE) OEM
–Ч–∞–Ј–µ–Љ–ї–µ–љ–Є–µ –Ї—Г–Ј–Њ–≤–∞
–°–Є–≥–љ–∞–ї—М–љ–Њ–µ –Ј–∞–Ј–µ–Љ–ї–µ–љ–Є–µ
–Т–µ—А—Е–љ–Є–є –Ї–Њ–љ—В–∞–Ї—В CAN (J-2284)
K Line ISO 9141-2 OEM
OEM Bus вАФ Line, Sae J1850
–®–Є–љ–∞ OEM OEM OEM
–Э–Є–ґ–љ–Є–є –Ї–Њ–љ—В–∞–Ї—В CAN (J-2284)
L Line ISO 9141-2
–Э–∞–њ—А—П–ґ–µ–љ–Є–µ –Р–Ъ–С
–Ъ–Њ–љ—В–∞–Ї—В—Л –і–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Њ–≥–Њ —А–∞–Ј—К–µ–Љ–∞ –і–ї—П –Є—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л—Е –њ—А–Њ—В–Њ–Ї–Њ–ї–Њ–≤. –Ъ–Њ–љ—В–∞–Ї—В—Л 4, 5, 7, 15, 16 вАФ ISO 9141-2. –Ъ–Њ–љ—В–∞–Ї—В—Л 2, 4, 5, 10, 16 вАФ J1850 PWM. –Ъ–Њ–љ—В–∞–Ї—В—Л 2, 4, 5, 16 (–±–µ–Ј 10) вАФ J1850 VPW. –Я—А–Њ—В–Њ–Ї–Њ–ї ISO 9141-2 –Є–і–µ–љ—В–Є—Д–Є—Ж–Є—А—Г–µ—В—Б—П –љ–∞–ї–Є—З–Є–µ–Љ –Ї–Њ–љ—В–∞–Ї—В–∞ 7 –Є –Њ—В—Б—Г—В—Б—В–≤–Є–µ–Љ 2 –Є/–Є–ї–Є 10 –Ї–Њ–љ—В–∞–Ї—В–Њ–≤ –љ–∞ –і–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Њ–Љ —А–∞–Ј—К–µ–Љ–µ. –Х—Б–ї–Є –Њ—В—Б—Г—В—Б—В–≤—Г–µ—В –Ї–Њ–љ—В–∞–Ї—В 7, –≤ —Б–Є—Б—В–µ–Љ–µ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –њ—А–Њ—В–Њ–Ї–Њ–ї SAE J1850 VPW (Variable Pulse Width Modulation) –Є–ї–Є SAE J1850 PWM (Pulse Width Modulation).
–Т—Б–µ —В—А–Є –њ—А–Њ—В–Њ–Ї–Њ–ї–∞ –Њ–±–Љ–µ–љ–∞ –і–∞–љ–љ—Л—Е —А–∞–±–Њ—В–∞—О—В —З–µ—А–µ–Ј —Б—В–∞–љ–і–∞—А—В–љ—Л–є –Ї–∞–±–µ–ї—М OBD-II J1962 connector. –Ю–њ–Є—Б–∞–љ–Є—П –Ї–Њ–і–Њ–≤ DTC –Ъ–Њ–і DTC —Б–Њ—Б—В–Њ–Є—В –Є–Ј 5 —Ж–Є—Д—А. –Я—А–Є –њ–Њ–Љ–Њ—Й–Є –і–∞–љ–љ–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є –≤—Л –Љ–Њ–ґ–µ—В–µ —Г–і–∞–ї–Є—В—М –Ї–Њ–і DTC –і–∞–ґ–µ –≤ —В–Њ–Љ —Б–ї—Г—З–∞–µ, –µ—Б–ї–Є —Г –≤–∞—Б –љ–µ—В –Њ–њ–Є—Б–∞–љ–Є—П –і–∞–љ–љ–Њ–≥–Њ –Ї–Њ–і–∞.
–Ю–±–Њ–Ј–љ–∞—З–µ–љ–Є—П –Ї–Њ–і–Њ–≤ DTC
–°–њ–Є—Б–Њ–Ї –љ–∞–Є–±–Њ–ї–µ–µ —Г–њ–Њ—В—А–µ–±–Є—В–µ–ї—М–љ—Л—Е —Б–Њ–Ї—А–∞—Й–µ–љ–Є–є –њ–Њ OBDII
AFC вАУ –†–∞—Б—Е–Њ–і–Њ–Љ–µ—А –≤–Њ–Ј–і—Г—Е–∞
ALDL вАУ –Ф–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Є–є –Ї–Њ–љ–љ–µ–Ї—В–Њ—А. –Ґ–∞–Ї —А–∞–љ—М—И–µ –љ–∞–Ј—Л–≤–∞–ї—Б—П –і–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Є–є –Ї–Њ–љ–љ–µ–Ї—В–Њ—А –і–ї—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є GM, –∞ —В–∞–Ї–ґ–µ —А–∞–Ј—К–µ–Љ –і–ї—П –њ–Њ–і–Ї–ї—О—З–µ–љ–Є—П —Б–Ї–∞–љ–љ–µ—А–∞;
—В–∞–Ї–ґ–µ –Љ–Њ–ґ–µ—В –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П –Ї–∞–Ї –љ–∞–Ј–≤–∞–љ–Є–µ –ї—О–±—Л—Е —Б–Є–≥–љ–∞–ї–Њ–≤ OBD I
I CAN вАФ –Ъ–Њ–љ—В—А–Њ–ї–ї–µ—А
CARB вАУ –Ъ–∞–ї–Є—Д–Њ—А–љ–Є–є—Б–Ї–Є–є —Б–Њ–≤–µ—В –њ–Њ –∞—В–Љ–Њ—Б—Д–µ—А–љ—Л–Љ —А–µ—Б—Г—А—Б–∞–Љ
CFI вАУ —Ж–µ–љ—В—А–∞–ї—М–љ—Л–є –≤–њ—А—Л—Б–Ї —В–Њ–њ–ї–Є–≤–∞ (TBI) CFI вАУ –љ–µ–њ—А–µ—А—Л–≤–љ—Л–є –≤–њ—А—Л—Б–Ї —В–Њ–њ–ї–Є–≤–∞
CO вАУ –Љ–Њ–љ–Њ–Њ–Ї—Б–Є–і —Г–≥–ї–µ—А–Њ–і–∞
DLC вАУ –Ф–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Є–є –Ї–Њ–љ–љ–µ–Ї—В–Њ—А
Driving Cycle вАУ –Я–Њ—Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ—Б—В—М –њ—Г—Б–Ї–∞, –њ—А–Њ–≥—А–µ–≤–∞ –Є –і–≤–Є–ґ–µ–љ–Є—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, –≤ —Е–Њ–і–µ —Н—В–Њ–≥–Њ —Ж–Є–Ї–ї–∞ –њ—А–Њ–Є—Б—Е–Њ–і–Є—В —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ –≤—Б–µ—Е —Д—Г–љ–Ї—Ж–Є–є OBD II
DTC вАУ –Ъ–Њ–і –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є
ECM вАУ –С–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї–µ–Љ
EEC вАУ –≠–ї–µ–Ї—В—А–Њ–љ–љ–Њ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –і–≤–Є–≥–∞—В–µ–ї–µ–Љ
EEPROM or E2PROM вАУ –Я—А–Њ–≥—А–∞–Љ–Љ–Є—А—Г–µ–Љ–∞—П –њ–∞–Љ—П—В—М, –і–Њ—Б—В—Г–њ–љ–∞—П —В–Њ–ї—М–Ї–Њ –і–ї—П —З—В–µ–љ–Є—П
EFI вАУ —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –≤–њ—А—Л—Б–Ї —В–Њ–њ–ї–Є–≤–∞
EGR вАФ —А–µ—Ж–Є—А–Ї—Г–ї—П—Ж–Є—П –≤—Л—Е–ї–Њ–њ–љ—Л—Е –≥–∞–Ј–Њ–≤
EMR вАУ —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –±–ї–Њ–Ї —Г–Љ–µ–љ—М—И–µ–љ–Є—П —Г–≥–ї–∞ –Ј–∞–ґ–Є–≥–∞–љ–Є—П
EPA вАУ –°–Њ–≤–µ—В –њ–Њ –Њ—Е—А–∞–љ–µ –Њ–Ї—А—Г–ґ–∞—О—Й–µ–є —Б—А–µ–і—Л
ESC вАУ –≠–ї–µ–Ї—В—А–Њ–љ–љ–∞—П —А–µ–≥—Г–ї–Є—А–Њ–≤–Ї–∞ –Ј–∞–ґ–Є–≥–∞–љ–Є—П
EST вАУ –≠–ї–µ–Ї—В—А–Њ–љ–љ–∞—П —А–µ–≥—Г–ї–Є—А–Њ–≤–Ї–∞ –Љ–Њ–Љ–µ–љ—В–∞ –Ј–∞–ґ–Є–≥–∞–љ–Є—П
Fuel Trim вАУ –±–∞–ї–∞–љ—Б–Є—А–Њ–≤–Ї–∞ —Б–Њ—Б—В–∞–≤–∞ —Б–Љ–µ—Б–Є
HC вАФ —Г–≥–ї–µ–≤–Њ–і–Њ—А–Њ–і
HEI вАФ –Ј–∞–ґ–Є–≥–∞–љ–Є–µ
HO2S вАУ –њ–Њ–і–Њ–≥—А–µ–≤ –і–∞—В—З–Є–Ї–∞ –Ї–Є—Б–ї–Њ—А–Њ–і–∞
ISO 9141 вАУ –Љ–µ–ґ–і—Г–љ–∞—А–Њ–і–љ—Л–є —Б—В–∞–љ–і–∞—А—В –і–ї—П —А–∞–Ј—К–µ–Љ–∞ OBDII
J1850PWM вАУ –њ—А–Њ—В–Њ–Ї–Њ–ї –і–ї—П —А–∞–Ј—К–µ–Љ–∞ OBD II, —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Л–є –њ–Њ —Б—В–∞–љ–і–∞—А—В—Г SAE
J1850VPW вАФ –њ—А–Њ—В–Њ–Ї–Њ–ї –і–ї—П —А–∞–Ј—К–µ–Љ–∞ OBD II, —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Л–є –њ–Њ —Б—В–∞–љ–і–∞—А—В—Г SAE
J1962 вАУ —Б—В–∞–љ–і–∞—А—В –і–ї—П –і–Є–∞–≥–љ–Њ—Б—В–Є—З–µ—Б–Ї–Њ–≥–Њ –Ї–Њ–љ–љ–µ–Ї—В–Њ—А–∞ OBD II, —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Л–є –њ–Њ —Б—В–∞–љ–і–∞—А—В—Г SAE
J1978 вАУ —Б—В–∞–љ–і–∞—А—В SAE –і–ї—П —Б–Ї–∞–љ–љ–µ—А–Њ–≤ OBD II
J1979 вАУ —Б—В–∞–љ–і–∞—А—В SAE –і–ї—П —А–µ–ґ–Є–Љ–Њ–≤ –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–Є
J2012 вАУ —Б—В–∞–љ–і–∞—А—В SAE, –Њ–і–Њ–±—А–µ–љ–љ—Л–є EPA, –і–ї—П —Б–Њ–Њ–±—Й–µ–љ–Є–є –њ—А–Є —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–Є —Б–Є—Б—В–µ–Љ—Л –≤—Л—Е–ї–Њ–њ–љ—Л—Е –≥–∞–Ј–Њ–≤
MAF вАУ —А–∞—Б—Е–Њ–і –≤–Њ–Ј–і—Г—Е–∞
MAP вАУ –∞–±—Б–Њ–ї—О—В–љ–Њ–µ –і–∞–≤–ї–µ–љ–Є–µ –≤–Њ –≤–њ—Г—Б–Ї–љ–Њ–Љ –Ї–Њ–ї–ї–µ–Ї—В–Њ—А–µ
MAT вАУ —В–µ–Љ–њ–µ—А–∞—В—Г—А–∞ –≤–Њ–Ј–і—Г—Е–∞ –≤–Њ –≤–њ—Г—Б–Ї–љ–Њ–Љ –Ї–Њ–ї–ї–µ–Ї—В–Њ—А–µ
MIL вАУ –Є–љ–і–Є–Ї–∞—В–Њ—А–љ–∞—П –ї–∞–Љ–њ–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є. –Ы–∞–Љ–њ–∞ ¬ЂCheck Engine Light¬ї –љ–∞ –њ–∞–љ–µ–ї–Є –њ—А–Є–±–Њ—А–Њ–≤.
NOx вАУ –Њ–Ї—Б–Є–і –∞–Ј–Њ—В–∞
O2 вАФ –Ї–Є—Б–ї–Њ—А–Њ–і
OBD вАФ –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–∞ OBDII or OBD II вАУ —Г—Б–Њ–≤–µ—А—И–µ–љ—Б—В–≤–Њ–≤–∞–љ–љ—Л–є —Б—В–∞–љ–і–∞—А—В –і–ї—П –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–Є –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є –≤ –°–®–Р –њ–Њ—Б–ї–µ 1-1- 96
Parameters вАУ –Я–∞—А–∞–Љ–µ—В—А—Л –њ–Њ –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–µ OBD II
PCM вАУ –С–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П —В—А–∞–љ—Б–Љ–Є—Б—Б–Є–µ–є
PCV вАФ –Ъ–∞—А—В–µ—А
Proprietary Readings вАУ –Я–∞—А–∞–Љ–µ—В—А—Л –±–Њ—А—В–Њ–≤–Њ–≥–Њ –Ї–Њ–Љ–њ—М—О—В–µ—А–∞, –Ї–Њ—В–Њ—А—Л–µ –љ–µ —В—А–µ–±—Г—О—В—Б—П –і–ї—П –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–Є OBD II, –љ–Њ –Љ–Њ–≥—Г—В –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П –і–ї—П –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–Є –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є —А–∞–Ј–ї–Є—З–љ—Л—Е —В–Є–њ–Њ–≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є.
PTC вАУ –Ъ–Њ–і –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є
RPM вАУ –Њ–±/–Љ–Є–љ
Scan Tool вАФ —Б–Ї–∞–љ–љ–µ—А
SES вАУ –ї–∞–Љ–њ–∞ —Б–µ—А–≤–Є—Б–љ–Њ–≥–Њ –Њ–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї—П –љ–∞ –њ–∞–љ–µ–ї–Є –њ—А–Є–±–Њ—А–Њ–≤
SFI вАУ –њ–Њ—Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ—Л–є –≤–њ—А—Л—Б–Ї —В–Њ–њ–ї–Є–≤–∞ Stoichiometric ( StoyвАЩ-kee-o-metric)
Ratio вАУ –Ъ–Њ—Н—Д—Д–Є—Ж–Є–µ–љ—В —Б–≥–Њ—А–∞–љ–Є—П —В–Њ–њ–ї–Є–≤–∞
TPS вАУ –Ф–∞—В—З–Є–Ї –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є
VAC вАФ –≤–∞–Ї—Г—Г–Љ
VCM вАУ —Ж–µ–љ—В—А–∞–ї—М–љ—Л–є –±–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П
VIN вАУ –Є–і–µ–љ—В–Є—Д–Є–Ї–∞—Ж–Є–Њ–љ–љ—Л–є –љ–Њ–Љ–µ—А –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П
VSS вАУ –і–∞—В—З–Є–Ї —Б–Ї–Њ—А–Њ—Б—В–Є
WOT вАУ –Њ—В–Ї—А—Л—В–∞—П –і—А–Њ—Б—Б–µ–ї—М–љ–∞—П –Ј–∞—Б–ї–Њ–љ–Ї–∞
–Я—А–Њ—Д–Є–ї–∞–Ї—В–Є–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї
–Я—А–Њ—Д–Є–ї–∞–Ї—В–Є–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї

–Я—А–Њ–Љ—Л–≤–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї, –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–∞ –Є —А–µ–Љ–Њ–љ—В –Є–љ–ґ–µ–Ї—В–Њ—А–∞
–°—Г—Й–µ—Б—В–≤—Г–µ—В —Ж–µ–ї—Л–є –љ–∞–±–Њ—А —Б–∞–Љ—Л—Е –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л—Е —Б–µ—А–≤–Є—Б–љ—Л—Е –Њ–њ–µ—А–∞—Ж–Є–є, –Њ—В—Б—Г—В—Б—В–≤—Г—О—Й–Є—Е –≤ –њ–µ—А–µ—З–љ–µ –≤—Л–њ–Њ–ї–љ—П–µ–Љ—Л—Е —А–∞–±–Њ—В –Љ–љ–Њ–≥–Є—Е —В–µ—Е—Ж–µ–љ—В—А–Њ–≤. –Я—А–Є—З–Є–љ–∞ —В–Њ–Љ—Г — –љ–µ–і–Њ—Б—В–∞—В–Њ—З–љ–Њ–µ –Ј–љ–∞–љ–Є–µ –≤–Њ–њ—А–Њ—Б–∞ —А—Г–Ї–Њ–≤–Њ–і—Б—В–≤–Њ–Љ —Б–µ—А–≤–Є—Б–∞, —Б–ї–∞–±–∞—П —В–µ—Е–љ–Є—З–µ—Б–Ї–∞—П –њ–Њ–і–≥–Њ—В–Њ–≤–Ї–∞ –њ–µ—А—Б–Њ–љ–∞–ї–∞, –љ–µ–ґ–µ–ї–∞–љ–Є–µ —В—А–∞—В–Є—В—М –ї–Є—И–љ–Є–µ —Б—А–µ–і—Б—В–≤–∞ –љ–∞ –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–µ. –Э–Њ –Є–Љ–µ–љ–љ–Њ –Њ—В—Б—Г—В—Б—В–≤–Є–µ —Н—В–Є—Е —Г—Б–ї—Г–≥ –Ј–∞—З–∞—Б—В—Г—О –љ–µ –і–∞–µ—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –њ—А–Њ–≤–µ—Б—В–Є –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ–Њ –њ–Њ–ї–љ–Њ—Ж–µ–љ–љ—Л–є —А–µ–Љ–Њ–љ—В –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –Э–∞–≥–ї—П–і–љ—Л–Љ –њ—А–Є–Љ–µ—А–Њ–Љ –Љ–Њ–ґ–µ—В —Б–ї—Г–ґ–Є—В—М —Г—Б–ї—Г–≥–∞ –њ–Њ –њ—А–Њ–Љ—Л–≤–Ї–µ —Д–Њ—А—Б—Г–љ–Њ–Ї. –Ю —В–Њ–Љ, –њ–Њ—З–µ–Љ—Г —Н—В–Њ –њ—А–µ–і–ї–Њ–ґ–µ–љ–Є–µ –і–Њ–ї–ґ–љ–Њ –±—Л—В—М –≤ –∞—А—Б–µ–љ–∞–ї–µ –ї—О–±–Њ–є —Г–≤–∞–ґ–∞—О—Й–µ–є —Б–µ–±—П –°–Ґ–Ю –Є –Њ —В–Њ–Љ, –Ї–∞–Ї–Њ–є –Љ–µ—В–Њ–і –њ—А–Њ–Љ—Л–≤–Ї–Є –љ–∞–Є–±–Њ–ї–µ–µ –Њ–њ—В–Є–Љ–∞–ї–µ–љ — –≤ –і–∞–љ–љ–Њ–Љ –Љ–∞—В–µ—А–Є–∞–ї–µ.
–Т–њ—А—Л—Б–Ї –Є –µ–≥–Њ –њ—А–Њ–±–ї–µ–Љ—Л
–Э–µ—В –љ—Г–ґ–і—Л –љ–∞–њ–Њ–Љ–Є–љ–∞—В—М –Њ ¬Ђ–Ї–∞—З–µ—Б—В–≤–µ¬ї —В–Њ–њ–ї–Є–≤–∞, –≤—Л–њ—Г—Б–Ї–∞–µ–Љ–Њ–≥–Њ –љ–∞ –≤—Б–µ–є –љ–µ–Њ–±—М—П—В–љ–Њ–є —В–µ—А—А–Є—В–Њ—А–Є–Є –±—Л–≤—И–µ–≥–Њ –°–Њ—О–Ј–∞ (—Б—А–∞–Ј—Г –Њ–≥–Њ–≤–Њ—А–Є–Љ—Б—П, —А–µ—З—М –њ–Њ–є–і–µ—В –ї–Є—И—М –Њ –±–µ–љ–Ј–Є–љ–Њ–≤—Л—Е –і–≤–Є–≥–∞—В–µ–ї—П—Е, –њ–Њ—Б–Ї–Њ–ї—М–Ї—Г –і–Є–Ј–µ–ї—М — —В–µ–Љ–∞ –і–ї—П –Њ—В–і–µ–ї—М–љ–Њ–≥–Њ —А–∞–Ј–≥–Њ–≤–Њ—А–∞). –Т—Л–љ—Г–ґ–і–µ–љ–љ–∞—П –њ–µ—А–µ–≤–∞—А–Є–≤–∞—В—М –±–µ–љ–Ј–Є–љ —В–Њ–њ–ї–Є–≤–љ–∞—П —Б–Є—Б—В–µ–Љ–∞ –ї—О–±–Њ–≥–Њ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, –і–∞–ґ–µ —Б–∞–Љ—Л—Е –њ—А–µ—Б—В–Є–ґ–љ—Л—Е –Љ–∞—А–Њ–Ї, –њ–Њ—Б—В–Њ—П–љ–љ–Њ –њ–Њ–і–≤–µ—А–≥–∞–µ—В—Б—П –љ–µ–ї–µ–≥–Ї–Є–Љ –Є—Б–њ—Л—В–∞–љ–Є—П–Љ. –Я—А–Є —А–∞–±–Њ—В–µ –і–≤–Є–≥–∞—В–µ–ї—П –Њ–љ–∞ –Ј–∞–≥—А—П–Ј–љ—П–µ—В—Б—П –љ–µ —В–Њ–ї—М–Ї–Њ —В–≤–µ—А–і—Л–Љ–Є —З–∞—Б—В–Є—Ж–∞–Љ–Є, –±–∞–љ–∞–ї—М–љ–Њ–є –≥—А—П–Ј—М—О, –љ–Њ –Є —Б–Љ–Њ–ї–Є—Б—В—Л–Љ–Є –Є –ї–∞–Ї–Њ–≤—Л–Љ–Є –Њ—В–ї–Њ–ґ–µ–љ–Є—П–Љ–Є. –Ю—Б–љ–Њ–≤—Г —Н—В–Є—Е –Њ—В–ї–Њ–ґ–µ–љ–Є–є —Б–Њ—Б—В–∞–≤–ї—П—О—В —Б–Њ–і–µ—А–ґ–∞—Й–Є–µ—Б—П –≤ –±–µ–љ–Ј–Є–љ–µ —Б–µ—А–љ–Є—Б—В—Л–µ –Є –Њ–ї–µ—Д–Є–љ–Њ–≤—Л–µ —Б–Њ–µ–і–Є–љ–µ–љ–Є—П.
–Т —Б–ї—Г—З–∞–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —В–∞–Ї–Њ–≥–Њ —В–Њ–њ–ї–Є–≤–∞, —З–Є—Б—В–Є—В—М –Є–љ–ґ–µ–Ї—В–Њ—А—Л —А–µ–Ї–Њ–Љ–µ–љ–і—Г–µ—В—Б—П —Г–ґ–µ —З–µ—А–µ–Ј 15-30 —В—Л—Б. –Ї–Љ –њ—А–Њ–±–µ–≥–∞, –∞ –Љ–љ–Њ–≥–Є–µ –∞–≤—В–Њ–њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї–Є –Є –≤–Њ–≤—Б–µ —Б–Њ–≤–µ—В—Г—О—В –Љ–µ–љ—П—В—М —Д–Њ—А—Б—Г–љ–Ї–Є —З–µ—А–µ–Ј –Ї–∞–ґ–і—Л–µ 120-140 —В—Л—Б. –Ї–Љ, –љ–µ–Ј–∞–≤–Є—Б–Є–Љ–Њ –Њ—В –Є—Е —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–≥–Њ —Б–Њ—Б—В–Њ—П–љ–Є—П. –Э–Њ —Б–ї–µ–і–Њ–≤–∞—В—М —Б–Њ–≤–µ—В–∞–Љ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї–µ–є ¬Ђ–≤ —Б–ї–µ–њ—Г—О¬ї –љ–µ –≤—Б–µ–≥–і–∞ —Г–Љ–µ—Б—В–љ–Њ. –Ъ—Г–і–∞ –±–Њ–ї–µ–µ –Њ–њ—В–Є–Љ–∞–ї—М–љ–Њ —Б–љ–∞—З–∞–ї–∞ –њ—А–Њ–≤–µ—Б—В–Є –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї—Г, –Є —Г–ґ–µ –љ–∞ –µ–µ –Њ—Б–љ–Њ–≤–∞–љ–Є–Є —А–µ—И–Є—В—М, —В—А–µ–±—Г–µ—В—Б—П –ї–Є ¬Ђ—Е–Є—А—Г—А–≥–Є—З–µ—Б–Ї–Њ–µ –≤–Љ–µ—И–∞—В–µ–ї—М—Б—В–≤–Њ¬ї –Є–ї–Є –Љ–Њ–ґ–љ–Њ –Њ–±–Њ–є—В–Є—Б—М –њ—А–Њ—Д–Є–ї–∞–Ї—В–Є—З–µ—Б–Ї–Є–Љ–Є –Љ–µ—А–∞–Љ–Є.
–Я—А–Є—З–µ–Љ –Њ—В–Ї–ї–∞–і—Л–≤–∞—В—М —А–µ—И–µ–љ–Є–µ –Њ–±–љ–∞—А—Г–ґ–µ–љ–љ–Њ–є –њ—А–Њ–±–ї–µ–Љ—Л –Ї—А–∞–є–љ–µ –љ–µ–ґ–µ–ї–∞—В–µ–ї—М–љ–Њ. –£ –Ј–∞—Б–Њ—А–µ–љ–љ–Њ–є —Д–Њ—А—Б—Г–љ–Ї–Є —Г–Љ–µ–љ—М—И–∞–µ—В—Б—П –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В—М, –Є–Ј–Љ–µ–љ—П—О—В—Б—П –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ –Є —Д–Њ—А–Љ–∞ —Д–∞–Ї–µ–ї–∞ —А–∞—Б–њ—Л–ї–∞, –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ –Є –њ–Њ–ї–љ–Њ–µ –њ—А–µ–Ї—А–∞—Й–µ–љ–Є–µ –≤–њ—А—Л—Б–Ї–∞. –Т —А–µ–Ј—Г–ї—М—В–∞—В–µ — –љ–µ—А–∞–≤–љ–Њ–Љ–µ—А–љ–∞—П –њ–Њ–і–∞—З–∞ —В–Њ–њ–ї–Є–≤–∞ –≤ —Ж–Є–ї–Є–љ–і—А—Л –Є –љ–µ–і–Њ—Б—В–∞—В–Њ–Ї —В–Њ–њ–ї–Є–≤–∞ –≤ –њ–µ—А–µ—Е–Њ–і–љ—Л—Е –Є –Љ–Њ—Й–љ–Њ—Б—В–љ—Л—Е —А–µ–ґ–Є–Љ–∞—Е —А–∞–±–Њ—В—Л –і–≤–Є–≥–∞—В–µ–ї—П. –Х—Б–ї–Є —Д–Њ—А—Б—Г–љ–Ї–∞ ¬Ђ–љ–µ–і–Њ–ї–Є–≤–∞–µ—В¬ї –Є –≤—Л–і–∞–µ—В –Њ–±–µ–і–љ–µ–љ–љ—Г—О —Б–Љ–µ—Б—М, —В–Њ —В–Њ–њ–ї–Є–≤–Њ –≤ —Ж–Є–ї–Є–љ–і—А–∞—Е –≥–Њ—А–Є—В –і–Њ–ї—М—И–µ, —Б—В–Њ–ї–њ –њ–ї–∞–Љ–µ–љ–Є –њ–Њ–њ–∞–і–∞–µ—В –≤ –≤—Л—Е–ї–Њ–њ–љ–Њ–є —В—А–∞–Ї—В, –љ–∞–Ї–∞–ї—П–µ—В—Б—П –Ї–ї–∞–њ–∞–љ –Є –µ–≥–Њ —А–∞—Б–Ї–∞–ї–µ–љ–љ—Л–є –Љ–µ—В–∞–ї–ї –±—М–µ—В —Б–µ–і–ї–Њ.
–Ъ–Њ–≥–і–∞ –ґ–µ —Д–Њ—А—Б—Г–љ–Ї–∞ ¬Ђ–ї—М–µ—В¬ї, –Є–і–µ—В –њ–µ—А–µ–Њ–±–Њ–≥–∞—Й–µ–љ–Є–µ —Б–Љ–µ—Б–Є, —З—В–Њ —З—А–µ–≤–∞—В–Њ –њ—А–Њ—З–Є–Љ–Є —В—П–ґ–µ–ї—Л–Љ–Є –њ–Њ—Б–ї–µ–і—Б—В–≤–Є—П–Љ–Є: –њ–µ—А–µ–Њ–±–Њ–≥–∞—Й–µ–љ–љ–∞—П —Б–Љ–µ—Б—М –≤—Л–Ј—Л–≤–∞–µ—В –≤—Л—Е–Њ–і –Є–Ј —Б—В—А–Њ—П –Ї–∞—В–∞–ї–Є–Ј–∞—В–Њ—А–∞ –Є —Б–Љ—Л–≤–∞–µ—В –Љ–∞—Б–ї—П–љ—Г—О –њ–ї–µ–љ–Ї—Г —Б–Њ —Б—В–µ–љ–Њ–Ї -–≤—Л—Е–Њ–і –Є–Ј —Б—В—А–Њ—П –њ–Њ—А—И–љ–µ–≤–Њ–є –≥—А—Г–њ–њ—Л.
–°—В–∞–≤–Є–Љ –і–Є–∞–≥–љ–Њ–Ј
–Я—А–Є –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–µ –њ—А–Њ–±–ї–µ–Љ—Л –љ–Є –≤ –Ї–Њ–µ–Љ —Б–ї—Г—З–∞–µ –љ–µ–ї—М–Ј—П –і–Њ–≤–µ—А—П—В—М—Б—П —В–Њ–ї—М–Ї–Њ –Њ—Й—Г—Й–µ–љ–Є—П–Љ –Љ–∞—Б—В–µ—А–∞. –Ш–Ј–≤–µ—Б—В–љ–Њ, —З—В–Њ –Љ–љ–Њ–≥–Є–µ –Њ–њ—Л—В–љ—Л–µ —Г–Љ–µ–ї—М—Ж—Л –Њ–њ—А–µ–і–µ–ї—П—О—В –Ј–∞–≥—А—П–Ј–љ–µ–љ–љ–Њ—Б—В—М —Д–Њ—А—Б—Г–љ–Њ–Ї –Є—Б—Е–Њ–і—П –Є–Ј —А–∞—Б—Б–Ї–∞–Ј–Њ–≤ –Ї–ї–Є–µ–љ—В–∞ (—А—Л–≤–Ї–Є, —Б—В—Г–Ї–Є –≤ –і–≤–Є–≥–∞—В–µ–ї–µ –Є —В.–њ., —Б–Њ–≤—Б–µ–Љ –љ–µ–Њ–±—П–Ј–∞—В–µ–ї—М–љ–Њ —Б–≤—П–Ј–∞–љ–љ—Л–µ —Б —Б–∞–Љ–Є–Љ–Є —Д–Њ—А—Б—Г–љ–Ї–∞–Љ–Є) –Є–ї–Є –љ–∞ —Б–ї—Г—Е (–Ј–∞–Љ–µ—В–Є–Љ, —З—В–Њ –њ–Њ–љ—П—В—М, –Ї–∞–Ї–∞—П –Є–Љ–µ–љ–љ–Њ –Є–Ј —Д–Њ—А—Б—Г–љ–Њ–Ї –±–∞—А–∞—Е–ї–Є—В, –љ–∞ —Б–ї—Г—Е –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Є –љ–µ–≤–Њ–Ј–Љ–Њ–ґ–љ–Њ). –Э–Њ –≤—Б–µ —Н—В–Њ –ї–µ–ґ–Є—В –≤ –Њ–±–ї–∞—Б—В–Є –њ—А–µ–і–њ–Њ–ї–Њ–ґ–µ–љ–Є–є. –Ю–њ—А–µ–і–µ–ї–Є—В—М –Є—Б—В–Є–љ–љ—Г—О –њ—А–Є—З–Є–љ—Г ¬Ђ–љ–µ–і–Њ–Љ–Њ–≥–∞–љ–Є—П¬ї –Љ–Њ–ґ–љ–Њ –ї–Є—И—М –љ–∞ –Њ—Б–љ–Њ–≤–∞–љ–Є–Є —Ж–µ–ї–Њ–≥–Њ —А—П–і–∞ –Њ–±—К–µ–Ї—В–Є–≤–љ—Л—Е —Б–Є–Љ–њ—В–Њ–Љ–Њ–≤.
–Ч–∞–≥—А—П–Ј–љ–µ–љ–Є–µ —Д–Њ—А—Б—Г–љ–Њ–Ї –њ—А–Њ—П–≤–ї—П–µ—В—Б—П –≤ —Б–љ–Є–ґ–µ–љ–Є–Є –Љ–Њ—Й–љ–Њ—Б—В–Є –і–≤–Є–≥–∞—В–µ–ї—П, –µ–≥–Њ –њ—А–Є–µ–Љ–Є—Б—В–Њ—Б—В–Є, –і–µ—В–Њ–љ–∞—Ж–Є–Њ–љ–љ—Л—Е —Б—В—Г–Ї–∞—Е –њ—А–Є —А–∞–Ј–≥–Њ–љ–µ, –љ–µ—Г—Б—В–Њ–є—З–Є–≤–Њ–є —А–∞–±–Њ—В–µ –љ–∞ —Е–Њ–ї–Њ—Б—В–Њ–Љ —Е–Њ–і—Г, –њ—А–Њ–±–ї–µ–Љ–∞—Е –њ—А–Є –Ј–∞–њ—Г—Б–Ї–µ (–Њ—Б–Њ–±–µ–љ–љ–Њ –≤ —Г—Б–ї–Њ–≤–Є—П—Е –љ–Є–Ј–Ї–Є—Е —В–µ–Љ–њ–µ—А–∞—В—Г—А), –≤ –Ї–∞–ї–Є–ї—М–љ–Њ–Љ –Ј–∞–ґ–Є–≥–∞–љ–Є–Є, –≤ —Г–≤–µ–ї–Є—З–µ–љ–љ–Њ–Љ —А–∞—Б—Е–Њ–і–µ —В–Њ–њ–ї–Є–≤–∞ –Є –њ–Њ–≤—Л—И–µ–љ–љ–Њ–є —В–Њ–Ї—Б–Є—З–љ–Њ—Б—В–Є –≤—Л—Е–ї–Њ–њ–∞. –Ґ–∞–Ї–ґ–µ –Ї–Њ—Б–≤–µ–љ–љ—Л–Љ–Є –њ—А–Є–Ј–љ–∞–Ї–∞–Љ–Є –Ј–∞—Б–Њ—А–µ–љ–љ–Њ—Б—В–Є —Д–Њ—А—Б—Г–љ–Њ–Ї –Љ–Њ–≥—Г—В –±—Л—В—М: —Г–≤–µ–ї–Є—З–µ–љ–љ–Њ–µ –≤—А–µ–Љ—П –≤–њ—А—Л—Б–Ї–∞ –Є —А–∞–Ј–љ–Є—Ж–∞ –≤—Л–±—А–Њ—Б–∞ —В–Њ–њ–ї–Є–≤–∞ –≤ —В–µ—Б—В–µ —Б –Њ—В–Ї–ї—О—З–µ–љ–Є–µ–Љ –Ј–∞–ґ–Є–≥–∞–љ–Є—П. –Ф–ї—П –њ—А–Њ–≤–µ—А–Ї–Є –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ–Њ–≥–Њ —Б–Њ—Б—В–Њ—П–љ–Є—П –і–µ–ї –≤ –њ–Њ—Б–ї–µ–і–љ–µ–Љ —Б–ї—Г—З–∞–µ —А–µ–Ї–Њ–Љ–µ–љ–і—Г–µ—В—Б—П –Є–ї–Є —Б—А–∞–Ј—Г –њ—А–Њ–Љ—Л—В—М —Д–Њ—А—Б—Г–љ–Ї–Є, –Є–ї–Є, –і–µ–Љ–Њ–љ—В–Є—А–Њ–≤–∞–≤ –Є—Е, –њ—А–Њ–≤–µ—А–Є—В—М –љ–∞ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В—М, –Ї–∞—З–µ—Б—В–≤–Њ —Д–∞–Ї–µ–ї–∞ —А–∞—Б–њ—Л–ї–∞ –Є –≥–µ—А–Љ–µ—В–Є—З–љ–Њ—Б—В—М –≤ –Ј–∞–Ї—А—Л—В–Њ–Љ —Б–Њ—Б—В–Њ—П–љ–Є–Є.
–Ф–Є–∞–≥–љ–Њ—Б—В–Є–Ї–∞ –Є –њ—А–Њ–Љ—Л–≤–Ї–∞ –Є–љ–ґ–µ–Ї—В–Њ—А–∞
–Э–µ –Њ—В—Е–Њ–і—П –Њ—В –Ї–∞–њ–Њ—В–∞
–Я–µ—А–µ–є–і–µ–Љ –љ–µ–њ–Њ—Б—А–µ–і—Б—В–≤–µ–љ–љ–Њ –Ї —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є. –Ч–і–µ—Б—М —Г —Б–µ—А–≤–Є—Б–Љ–µ–љ–∞ –≤—Б–µ–≥–і–∞ –µ—Б—В—М –≤—Л–±–Њ—А — –і–µ–Љ–Њ–љ—В–Є—А–Њ–≤–∞—В—М –Є–ї–Є –љ–µ—В. –Я–µ—А–≤—Л–є –≤–∞—А–Є–∞–љ—В –Ј–∞—В—А–∞—В–љ–µ–µ –Є –љ–∞–і–µ–ґ–љ–µ–µ, –≤—В–Њ—А–Њ–є, –Ї–∞–Ї –≤–Њ–і–Є—В—Б—П, –і–µ—И–µ–≤–ї–µ –Є –њ—А–Њ—Й–µ, –љ–Њ –љ–µ –≤—Б–µ–≥–і–∞ —Н—Д—Д–µ–Ї—В–Є–≤–µ–љ.
–°–њ–Њ—Б–Њ–± 1: –њ—А–Њ–Љ—Л–≤–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї —Б –њ–Њ–Љ–Њ—Й—М—О –Љ–Њ—О—Й–µ–є –њ—А–Є—Б–∞–і–Ї–Є, –і–Њ–±–∞–≤–ї—П–µ–Љ–Њ–є –≤ —В–Њ–њ–ї–Є–≤–љ—Л–є –±–∞–Ї
–≠—В–Њ—В, –њ–Њ–ґ–∞–ї—Г–є, —Б–∞–Љ—Л–є –њ—А–Њ—Б—В–Њ–є —Б–њ–Њ—Б–Њ–± –њ–Њ–Ј–≤–Њ–ї—П–µ—В –њ—А–Њ–Љ—Л—В—М –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Є –≤—Б–µ –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В—Л —В–Њ–њ–ї–Є–≤–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л, —Б–Љ–Њ–љ—В–Є—А–Њ–≤–∞–љ–љ—Л–µ –љ–∞ –±–µ–љ–Ј–Њ–Љ–∞–≥–Є—Б—В—А–∞–ї–Є: –±–µ–љ–Ј–Њ–±–∞–Ї, —В–Њ–њ–ї–Є–≤–љ—Л–є –љ–∞—Б–Њ—Б, –±–µ–љ–Ј–Њ–њ—А–Њ–≤–Њ–і—Л, —В–Њ–њ–ї–Є–≤–љ—Г—О —А–∞–Љ–њ—Г, —А–µ–≥—Г–ї—П—В–Њ—А –і–∞–≤–ї–µ–љ–Є—П, —Б–∞–Љ —Д–Њ—А—Б—Г–љ–Ї–Є. –Э–Њ –≤ —Н—В–Њ–Љ –Ї—А–Њ–µ—В—Б—П –Є –љ–µ–і–Њ—Б—В–∞—В–Њ–Ї –Љ–µ—В–Њ–і–∞, –њ–Њ—Б–Ї–Њ–ї—М–Ї—Г –Њ—В–ї–Њ–ґ–µ–љ–Є—П –Є –≥—А—П–Ј—М, —Б–Љ—Л—В—Л–µ –Є–Ј –±–µ–љ–Ј–Њ–±–∞–Ї–∞, –±–µ–љ–Ј–Њ–њ—А–Њ–≤–Њ–і–∞ –Є –±–µ–љ–Ј–Њ—Д–Є–ї—М—В—А–∞ –Љ–Њ–≥—Г—В –µ—Й–µ –±–Њ–ї—М—И–µ –Ј–∞–≥—А—П–Ј–љ–Є—В—М —Д–Њ—А—Б—Г–љ–Ї–Є –Є –Ї–ї–∞–њ–∞–љ —А–µ–≥—Г–ї—П—В–Њ—А–∞ –і–∞–≤–ї–µ–љ–Є—П. –Ъ —В–Њ–Љ—Г –ґ–µ, —В–∞–Ї–∞—П –µ—Б—В–µ—Б—В–≤–µ–љ–љ–∞—П –њ—А–Њ–Љ—Л–≤–Ї–∞ –Љ–Њ–ґ–µ—В –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П —В–Њ–ї—М–Ї–Њ –≤ –Ї–∞—З–µ—Б—В–≤–µ –њ—А–Њ—Д–Є–ї–∞–Ї—В–Є—З–µ—Б–Ї–Њ–є –Љ–µ—А—Л. –Т —Б–ї—Г—З–∞–µ —Б–Є–ї—М–љ—Л—Е –Ј–∞–≥—А—П–Ј–љ–µ–љ–Є–є —Н—В–Њ—В —Б–њ–Њ—Б–Њ–± –љ–µ—Н—Д—Д–µ–Ї—В–Є–≤–µ–љ.
–°–њ–Њ—Б–Њ–± 2: –Љ–Њ–є–Ї–∞ —Б –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ–Љ —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л—Е —Г—Б—В–∞–љ–Њ–≤–Њ–Ї –њ–Њ–і–∞—З–Є –Љ–Њ—О—Й–µ–≥–Њ —Б–Њ–ї—М–≤–µ–љ—В–∞ –Ї —В–Њ–њ–ї–Є–≤–љ–Њ–є —А–∞–Љ–њ–µ
–Т —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –њ—А–Њ–Љ—Л–≤–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –≤ –Њ–±—Е–Њ–і —И—В–∞—В–љ–Њ–є —В–Њ–њ–ї–Є–≤–Њ–њ–Њ–і–∞—О—Й–µ–є —Б–Є—Б—В–µ–Љ—Л: —Б–Њ–ї–≤–µ–љ—В –љ–µ –њ–Њ–њ–∞–і–∞–µ—В –≤ –±–µ–љ–Ј–Њ–±–∞–Ї, —В–Њ–њ–ї–Є–≤–љ—Л–є –љ–∞—Б–Њ—Б –Є —В–Њ–њ–ї–Є–≤–Њ–њ—А–Њ–≤–Њ–і—Л. –Ь–Њ–є–Ї—Г –Љ–Њ–ґ–љ–Њ –њ—А–Њ–≤–Њ–і–Є—В—М —Б –њ–Њ–Љ–Њ—Й—М—О –Њ–і–љ–Њ-–Є –і–≤—Г—Е–Ї–Њ–љ—В—Г—А–љ—Л—Е —Г—Б—В–∞–љ–Њ–≤–Њ–Ї. –Я–µ—А–≤—Л–µ –њ–Њ–і–∞—О—В —Б–Њ–ї—М–≤–µ–љ—В —В–Њ–ї—М–Ї–Њ –Ї —В–Њ–њ–ї–Є–≤–љ–Њ–є —А–∞–Љ–њ–µ, –∞ –і–≤—Г—Е–Ї–Њ–љ—В—Г—А–љ—Л–µ –Ј–∞–і–µ–є—Б—В–≤—Г—О—В –µ—Й–µ –Є –≤–Њ–Ј–≤—А–∞—В–љ—Г—О –Љ–∞–≥–Є—Б—В—А–∞–ї—М –Њ—В —А–∞–Љ–њ—Л, –њ–Њ—Н—В–Њ–Љ—Г –њ–Њ–Ј–≤–Њ–ї—П—О—В –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ –њ—А–Њ–Љ—Л—В—М —А–µ–≥—Г–ї—П—В–Њ—А –і–∞–≤–ї–µ–љ–Є—П: –µ—Й–µ –і–Њ –љ–∞—З–∞–ї–∞ –њ—А–Њ—Ж–µ—Б—Б–∞ –Љ–Њ–є–Ї–Є —Д–Њ—А—Б—Г–љ–Њ–Ї –Љ–Њ—О—Й–Є–є —Б–Њ–ї—М–≤–µ–љ—В –њ—А–Њ–Ї–∞—З–Є–≤–∞–µ—В—Б—П –њ–Њ —В–Њ–њ–ї–Є–≤–љ–Њ–є —А–∞–Љ–њ–µ –Њ—В —И—В—Г—Ж–µ—А–∞ –њ–Њ–і–∞—О—Й–µ–є — –Ї —И—В—Г—Ж–µ—А—Г –≤–Њ–Ј–≤—А–∞—В–љ–Њ–є –±–µ–љ–Ј–Њ–Љ–∞–≥–Є—Б—В—А–∞–ї–Є.
–Я–µ—А–µ–і —В–µ–Љ, –Ї–∞–Ї –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –Њ–і–љ–Њ–Ї–Њ–љ—В—Г—А–љ—Г—О —Г—Б—В–∞–љ–Њ–≤–Ї—Г, –љ—Г–ґ–љ–Њ –Њ–±—П–Ј–∞—В–µ–ї—М–љ–Њ –њ—А–µ–і–≤–∞—А–Є—В–µ–ї—М–љ–Њ –њ—А–Њ–Љ—Л—В—М —В–Њ–њ–ї–Є–≤–љ—Г—О —А–∞–Љ–њ—Г. –Х—Б–ї–Є —Н—В–Њ–≥–Њ –љ–µ —Б–і–µ–ї–∞—В—М, —В–Њ –Њ—В–ї–Њ–ґ–µ–љ–Є—П, –Њ—В—Б–ї–Њ–Є–≤—И–Є–µ—Б—П –њ–Њ–і –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ–Љ —Б–Њ–ї—М–≤–µ–љ—В–∞ –Њ—В —Б—В–µ–љ–Њ–Ї —А–∞–Љ–њ—Л, –Љ–Њ–≥—Г—В —Б–Є–ї—М–љ–Њ –Ј–∞—Б–Њ—А–Є—В—М —Д–Њ—А—Б—Г–љ–Ї–Є, —З—В–Њ –њ–Њ—В—А–µ–±—Г–µ—В –њ–Њ—Б–ї–µ–і—Г—О—Й–µ–є –Љ–Њ–є–Ї–Є —Д–Њ—А—Б—Г–љ–Њ–Ї —Б –Њ–±—П–Ј–∞—В–µ–ї—М–љ—Л–Љ –і–µ–Љ–Њ–љ—В–∞–ґ–µ–Љ –Є–ї–Є –і–∞–ґ–µ –Є—Е –Ј–∞–Љ–µ–љ—Л.
–Т—Л–±—А–∞–≤ —Б–њ–Њ—Б–Њ–± –њ—А–Њ–Љ—Л–≤–Ї–Є –±–µ–Ј –і–µ–Љ–Њ–љ—В–∞–ґ–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї, –≤—Л –і–Њ–ї–ґ–љ—Л –±—Л—В—М –≥–Њ—В–Њ–≤—Л –Ї —В–Њ–Љ—Г, —З—В–Њ –Њ–љ –љ–µ –≥–∞—А–∞–љ—В–Є—А—Г–µ—В —А–µ–Ј—Г–ї—М—В–∞—В–∞ –Є —Н—Д—Д–µ–Ї—В–Є–≤–µ–љ –≤ 60-90% —Б–ї—Г—З–∞–µ–≤. –Х—Б–ї–Є —А–µ–Ј—Г–ї—М—В–∞—В–∞ –љ–µ—В, —В–Њ –њ—А–Є–і–µ—В—Б—П –ї–Є–±–Њ –і–µ–ї–∞—В—М –њ–Њ–≤—В–Њ—А–љ—Г—О –њ—А–Њ–Љ—Л–≤–Ї—Г, –ї–Є–±–Њ –Љ—Л—В—М —Д–Њ—А—Б—Г–љ–Ї–Є —Г–ґ–µ —Б –і–µ–Љ–Њ–љ—В–∞–ґ–Њ–Љ.
–Х—Б—В—М —Г —Н—В–Њ–≥–Њ —Б–њ–Њ—Б–Њ–±–∞ –Є —Б–≤–Њ–Є –њ–ї—О—Б—Л. –Я—А–Є –њ—А–Њ–Љ—Л–≤–Ї–µ —Д–Њ—А—Б—Г–љ–Њ–Ї –±–µ–Ј –і–µ–Љ–Њ–љ—В–∞–ґ–∞ –њ—А–Њ–Є—Б—Е–Њ–і–Є—В —В–∞–Ї–Њ–є –њ–Њ–ї–µ–Ј–љ—Л–є –њ—А–Њ—Ж–µ—Б—Б, –Ї–∞–Ї –Њ—З–Є—Й–µ–љ–Є–µ —И—В–Њ–Ї–Њ–≤ –≤–њ—Г—Б–Ї–љ—Л—Е –Ї–ї–∞–њ–∞–љ–Њ–≤ –Є –Ї–∞–Љ–µ—А —Б–≥–Њ—А–∞–љ–Є—П –Њ—В –љ–∞–≥–∞—А–∞. –°–ї–µ–і—Г–µ—В –њ–Њ–Љ–љ–Є—В—М, —З—В–Њ –њ—А–Њ–Љ—Л–≤–Ї—Г –љ—Г–ґ–љ–Њ –њ—А–Њ–≤–Њ–і–Є—В—М –ї–Є–±–Њ –љ–∞ —А–µ–Ј–µ—А–≤–љ—Л—Е —Б–≤–µ—З–∞—Е, –ї–Є–±–Њ —Б–≤–µ—З–Є –і–Њ–ї–ґ–љ—Л –±—Л—В—М –Ј–∞–Љ–µ–љ–µ–љ—Л –љ–∞ –љ–Њ–≤—Л–µ –њ–Њ—Б–ї–µ –њ—А–Њ–Љ—Л–≤–Ї–Є.
–Ф–ї—П —В–Њ–≥–Њ —З—В–Њ–±—Л ¬Ђ–љ–∞—А–Њ—Б—В—Л –Є –Њ—В–ї–Њ–ґ–µ–љ–Є—П¬ї –Њ—В—Б–ї–Њ–Є–ї–Є—Б—М —Б –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є –Ї–ї–∞–њ–∞–љ–Њ–≤ –Є —Б—В–µ–љ–Њ–Ї –Ї–∞–Љ–µ—А—Л —Б–≥–Њ—А–∞–љ–Є—П, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Ј–∞–≥–ї—Г—И–Є—В—М –і–≤–Є–≥–∞—В–µ–ї—М –Є –њ—А–Њ–Ї—А—Г—В–Є—В—М –≤ —Е–Њ–ї–Њ—Б—В—Г—О –±–µ–Ј –Є—Б–Ї—А–Њ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—П. –Т —А–µ–Ј—Г–ї—М—В–∞—В–µ —Н—В–Њ–≥–Њ –њ—А–Њ–Є–Ј–Њ–є–і–µ—В –Ј–∞–њ–Њ–ї–љ–µ–љ–Є–µ –Ї–∞–Љ–µ—А—Л —Б–≥–Њ—А–∞–љ–Є—П –Є —А–∞—Б–Ї–Њ–Ї-—Б–Њ–≤–Ї–∞ —Б–∞–Љ–Њ–є –Ї–∞–Љ–µ—А—Л –Є –Ї–ї–∞–њ–∞–љ–Њ–≤. –Я—А–Є –њ—А–Њ–Љ—Л–≤–Ї–µ –±–µ–Ј –і–µ–Љ–Њ–љ—В–∞–ґ–∞ –і–Є–∞–≥–љ–Њ—Б—В –і–Њ–ї–ґ–µ–љ —Б–ї–µ–і–Є—В—М –Ј–∞ —В–µ–Љ–њ–µ—А–∞—В—Г—А–Њ–є —Б–∞–Љ–Њ–≥–Њ –і–≤–Є–≥–∞—В–µ–ї—П. –≠—В–Њ —Б–≤—П–Ј–∞–љ–Њ —Б —В–µ–Љ, —З—В–Њ –њ—А–Є –њ—А–Њ–Љ—Л–≤–Ї–µ –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П —Б–Њ–ї—М–≤–µ–љ—В, –Ї–Њ—В–Њ—А—Л–є –њ—А–Є —Б–≥–Њ—А–∞–љ–Є–Є –≤—Л–і–µ–ї—П–µ—В –±–Њ–ї—М—И–µ —В–µ–њ–ї–∞ –Є —Н—В–Њ –Љ–Њ–ґ–µ—В –њ—А–Є–≤–µ—Б—В–Є –Ї –њ–µ—А–µ–≥—А–µ–≤—Г –і–≤–Є–≥–∞—В–µ–ї—П.
–Ю—В–Љ–µ—В–Є–Љ, —З—В–Њ –њ—А–Њ–Љ—Л–≤–Ї—Г —Д–Њ—А—Б—Г–љ–Њ–Ї –±–µ–Ј –і–µ–Љ–Њ–љ—В–∞–ґ–∞ –Љ–Њ–ґ–љ–Њ –њ—А–Њ–≤–Њ–і–Є—В—М –і–∞–ї–µ–Ї–Њ –љ–µ –љ–∞ –≤—Б–µ—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е. –Э–∞—З–Є–љ–∞—П —Б 2002-2003 –≥–Њ–і–Њ–≤ –≤—Л–њ—Г—Б–Ї–∞, –Љ–љ–Њ–≥–Є–µ –Љ–∞—И–Є–љ—Л –Є–Љ–µ—О—В –і—А—Г–≥–Є–µ — –Ї–µ—А–∞–Љ–Є—З–µ—Б–Ї–Є–µ — –Ї–∞—В–∞–ї–Є–Ј–∞—В–Њ—А—Л, –Ї–Њ—В–Њ—А—Л–µ –Љ–≥–љ–Њ–≤–µ–љ–љ–Њ –Ј–∞–±–Є–≤–∞—О—В—Б—П —Б–Љ—Л—В—Л–Љ–Є –Њ—В–ї–Њ–ґ–µ–љ–Є—П–Љ–Є, —З—В–Њ –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Є –≤—Б–µ–≥–і–∞ –≤–µ–і–µ—В –Ї –≤—Л—Е–Њ–і—Г –Ї–∞—В–∞–ї–Є–Ј–∞—В–Њ—А–Њ–≤ –Є–Ј —Б—В—А–Њ—П. –Э–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е –±–Њ–ї–µ–µ —Б—В–∞—А—И–µ–≥–Њ –≤–Њ–Ј—А–∞—Б—В–∞ –Љ–µ—В–Њ–і –њ—А–Њ–Љ—Л–≤–Ї–Є –±–µ–Ј –і–µ–Љ–Њ–љ—В–∞–ґ–∞ –њ—А–Є–Љ–µ–љ—П–µ—В—Б—П, –љ–Њ –Є–Љ–µ–µ—В —Б–≤–Њ–Є –Њ—Б–Њ–±–µ–љ–љ–Њ—Б—В–Є. –Ф–Є–∞–≥–љ–Њ—Б—В –і–Њ–ї–ґ–µ–љ –≤–љ–Є–Љ–∞—В–µ–ї—М–љ–Њ —Б–ї–µ–і–Є—В—М –Ј–∞ —В–µ–Љ–њ–µ—А–∞—В—Г—А–Њ–є –Ї–∞—В–∞–ї–Є–Ј–∞—В–Њ—А–∞: –Ї–Њ–≥–і–∞ –Ї–∞—В–∞–ї–Є–Ј–∞—В–Њ—А –Ј–∞–±–Є–≤–∞–µ—В—Б—П, –≤ –љ–µ–Љ –Љ–Њ–≥—Г—В –љ–∞—З–∞—В—М –і–Њ–≥–Њ—А–∞—В—М –Њ—Б—В–∞—В–Ї–Є –Ј–∞–≥—А—П–Ј–љ–µ–љ–Є–є –љ–µ –≤—Л—Е–Њ–і—П —З–µ—А–µ–Ј –≤—Л—Е–ї–Њ–њ–љ—Г—О —В—А—Г–±—Г. –Т —А–µ–Ј—Г–ї—М—В–∞—В–µ –њ—А–Њ–Є–Ј–Њ–є–і–µ—В ¬Ђ—Б–њ–µ–Ї–∞–љ–Є–µ¬ї —Б–Њ—В –Ї–∞—В–∞–ї–Є–Ј–∞—В–Њ—А–∞, –Є –Њ–љ –≤—Л–є–і–µ—В –Є–Ј —Б—В—А–Њ—П. –Я–Њ—Н—В–Њ–Љ—Г –≤–Њ –≤—А–µ–Љ—П –њ—А–Њ–Љ—Л–≤–Ї–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –і–≤–∞ —А–∞–Ј–∞ –Ј–∞–≥–ї—Г—И–Є—В—М –і–≤–Є–≥–∞—В–µ–ї—М, —З—В–Њ–±—Л –і–∞—В—М ¬Ђ–Њ—В–Ї–Є—Б–љ—Г—В—М¬ї –Ј–∞—Б—В–∞—А–µ–ї—Л–Љ –Ј–∞–≥—А—П–Ј–љ–µ–љ–Є—П–Љ.
–Я–Њ–љ—П—В–љ–Њ, —З—В–Њ –Њ—В—Б—Г—В—Б—В–≤–Є–µ –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є—Е –Њ–њ–µ—А–∞—Ж–Є–є –њ—А–Є –њ—А–Њ–Љ—Л–≤–Ї–µ —Д–Њ—А—Б—Г–љ–Њ–Ї –±–µ–Ј –і–µ–Љ–Њ–љ—В–∞–ґ–∞ –і–µ–ї–∞–µ—В —Н—В–Њ—В —Б–њ–Њ—Б–Њ–± –і–Њ–≤–Њ–ї—М–љ–Њ –њ—А–Њ—Б—В—Л–Љ –Є –љ–µ —Б–Є–ї—М–љ–Њ —В—А—Г–і–Њ–µ–Љ–Ї–Є–Љ. –Э–Њ –Ї–Њ–љ—В—А–Њ–ї—М –Ї–∞—З–µ—Б—В–≤–∞ –њ—А–Њ–≤–µ–і–µ–љ–љ—Л—Е —А–∞–±–Њ—В –Љ–Њ–ґ–µ—В –±—Л—В—М —В–Њ–ї—М–Ї–Њ –Ї–Њ—Б–≤–µ–љ–љ—Л–Љ. –Я—А–Њ–≤–µ—Б—В–Є —Д–∞–Ї—В–Є—З–µ—Б–Ї—Г—О –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї—Г –Љ–Њ–ґ–љ–Њ –ї–Є—И—М —Б–Њ —Б–љ—П—В–Є–µ–Љ —Д–Њ—А—Б—Г–љ–Њ–Ї —Б –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –°–і–µ–ї–∞—В—М –њ—А–Њ–Љ—Л–≤–Ї—Г —Д–Њ—А—Б—Г–љ–Њ–Ї —Б –і–µ–Љ–Њ–љ—В–∞–ґ–µ–Љ —В–∞–Ї–ґ–µ –Љ–Њ–ґ–љ–Њ –і–≤—Г–Љ—П —Б–њ–Њ—Б–Њ–±–∞–Љ–Є.
–Я—А–Њ–Љ—Л–≤–Ї–∞ –Є–љ–ґ–µ–Ї—В–Њ—А–∞ (—Д–Њ—А—Б—Г–љ–Њ–Ї) –≤ –Ь–Є–љ—Б–Ї–µ
–£–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–є –Ї–Њ–љ—В—А–Њ–ї—М
–°–њ–Њ—Б–Њ–± 3: –њ—А–Њ–≤–µ—А–Ї–∞ (–Њ–њ—А–µ—Б—Б–Њ–≤–Ї–∞) —Д–Њ—А—Б—Г–љ–Њ–Ї –љ–∞ —Б—В–µ–љ–і–µ
–Я—А–Њ–≤–µ—А–Ї–∞ –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –љ–∞ —Г—Б—В–∞–љ–Њ–≤–Ї–∞—Е, –Є–Љ–Є—В–Є—А—Г—О—Й–Є—Е —А–∞–±–Њ—В—Г —Д–Њ—А—Б—Г–љ–Њ–Ї –≤ –і–≤–Є–≥–∞—В–µ–ї–µ –љ–∞ —А–∞–Ј–љ—Л—Е —А–µ–ґ–Є–Љ–∞—Е. –Ґ–∞–Ї–∞—П —Г—Б—В–∞–љ–Њ–≤–Ї–∞ –њ–Њ–Ј–≤–Њ–ї—П–µ—В –њ—А–Њ–≤–µ—А–Є—В—М –≥–µ—А–Љ–µ—В–Є—З–љ–Њ—Б—В—М, —Д–∞–Ї–µ–ї —А–∞—Б–њ—Л–ї–∞ –Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В—М —Д–Њ—А—Б—Г–љ–Њ–Ї –њ–Њ —Ж–Є–ї–Є–љ–і—А–∞–Љ. –Я–Њ —А–µ–Ј—Г–ї—М—В–∞—В–∞–Љ –њ—А–Њ–≤–µ—А–Ї–Є –њ—А–Њ–Є–Ј–≤–Њ–і—П—В—Б—П –і–∞–ї—М–љ–µ–є—И–Є–µ —А–∞–±–Њ—В—Л.
–°–њ–Њ—Б–Њ–± 4: –Њ—З–Є—Б—В–Ї–∞ –≤ —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–є –≤–∞–љ–љ–µ
–Ю—З–Є—Б—В–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї –≤ –Љ–Њ—О—Й–µ–Љ —Б–Њ–ї—М–≤–µ–љ—В–µ –≤ —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–є –≤–∞–љ–љ–µ. –≠—В–Њ —Д–∞–Ї—В–Є—З–µ—Б–Ї–Є —Б–Њ–ї—М–≤–µ–љ—В–љ–∞—П –њ—А–Њ–Љ—Л–≤–Ї–∞ –љ–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ, —В–Њ–ї—М–Ї–Њ —Б –Ї–Њ–љ—В—А–Њ–ї–Є—А—Г–µ–Љ—Л–Љ —А–µ–Ј—Г–ї—М—В–∞—В–Њ–Љ. –£—Б—В–∞–љ–Њ–≤–Ї–∞ —Б–Њ–Ј–і–∞–µ—В –≤ –љ–∞—Е–Њ–і—П—Й–µ–Љ—Б—П –≤–љ—Г—В—А–Є —Д–Њ—А—Б—Г–љ–Ї–Є –Љ–Њ—О—Й–µ–Љ —Б–Њ–ї—М–≤–µ–љ—В–µ –Ї–∞–≤–Є—В–∞—Ж–Є—О: –њ–Њ–і –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ–Љ –Ј–≤—Г–Ї–Њ–≤—Л—Е –≤–Њ–ї–љ –≤–Њ–Ј–і—Г—И–љ—Л–µ –Љ–Є–Ї—А–Њ–њ—Г–Ј—Л—А–Є –≤–Њ–Ј–і—Г—Е–∞ ¬Ђ–≤–Ј—А—Л–≤–∞—О—В—Б—П¬ї –≤–љ—Г—В—А–Є —Б–Њ–ї—М–≤–µ–љ—В–∞, –Є —Г–і–∞—А–љ–∞—П –≤–Њ–ї–љ–∞ –њ–Њ–Ј–≤–Њ–ї—П–µ—В —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ –Њ—З–Є—Б—В–Є—В—М –Њ—В–ї–Њ–ґ–µ–љ–Є—П –љ–∞ –≤–љ—Г—В—А–µ–љ–љ–Є—Е –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В—П—Е —Д–Њ—А—Б—Г–љ–Ї–Є. –Ш–Љ–µ–љ–љ–Њ –Ї–∞–≤–Є—В–∞—Ж–Є—П –і–µ–ї–∞–µ—В —Н—В–Њ—В —Б–њ–Њ—Б–Њ–± –њ—А–Њ–Љ—Л–≤–Ї–Є –Њ—З–µ–љ—М —Н—Д—Д–µ–Ї—В–Є–≤–љ—Л–Љ. –Т–Њ –≤—А–µ–Љ—П –Њ—З–Є—Б—В–Ї–Є –љ–∞ —Д–Њ—А—Б—Г–љ–Ї—Г –њ–Њ–і–∞–µ—В—Б—П —Б–Є–≥–љ–∞–ї –љ–∞ –Њ—В–Ї—А—Л—В–Є–µ-–Ј–∞–Ї—А—Л—В–Є–µ. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ —Б–Њ–ї—М–≤–µ–љ—В –≤—Л–Љ—Л–≤–∞–µ—В –Њ—В–ї–Њ–ґ–µ–љ–Є—П –Є–Ј –Є—Б–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–≥–Њ —Н–ї–µ–Љ–µ–љ—В–∞ — –Є–≥–ї—Л —Д–Њ—А—Б—Г–љ–Ї–Є.
–Э–µ–і–Њ—Б—В–∞—В–Њ–Ї –ґ–µ —Г —Н—В–Њ–≥–Њ —Б–њ–Њ—Б–Њ–±–∞, –њ–Њ —Б—Г—В–Є, –Њ–і–Є–љ: –љ–∞–Є–±–Њ–ї—М—И–∞—П —Б—В–Њ–Є–Љ–Њ—Б—В—М —Г—Б—В–∞–љ–Њ–≤–Ї–Є –Є –≤–µ—А–Њ—П—В–љ–Њ—Б—В—М –њ–Њ–ї–љ–Њ–є –≤—Л–±—А–∞–Ї–Њ–≤–Ї–Є —Д–Њ—А—Б—Г–љ–Ї–Є –њ–Њ—Б–ї–µ –њ—А–Њ–Љ—Л–≤–Ї–Є.
–Я–Њ—Б–ї–µ —В–∞–Ї–Њ–є –њ—А–Њ–Љ—Л–≤–Ї–Є –Њ–±—П–Ј–∞—В–µ–ї—М–љ–Њ –љ–∞–і–Њ –њ–Њ–≤—В–Њ—А–Є—В—М ¬Ђ—Н—В–∞–њ 3¬ї –і–ї—П –≤—Л–±—А–∞–Ї–Њ–≤–Ї–Є —Д–Њ—А—Б—Г–љ–Њ–Ї. –Ь–µ—В–Њ–і –њ—А–Є–Љ–µ–љ–Є–Љ –і–ї—П —Д–Њ—А—Б—Г–љ–Њ–Ї –±–µ–Ј —В–µ—Д–ї–Њ–љ–Њ–≤–Њ–≥–Њ –њ–Њ–Ї—А—Л—В–Є—П.
–Ъ–∞–Ї –Љ—Л —Г–ґ–µ —Б–Ї–∞–Ј–∞–ї–Є, —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤—Л–µ –Љ–µ—В–Њ–і—Л –њ–Њ–Ј–≤–Њ–ї—П—О—В –њ—А–Њ–≤–µ—Б—В–Є –Ї–∞—З–µ—Б—В–≤–µ–љ–љ—Г—О –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї—Г –Є –њ–Њ–љ—П—В—М, –і–∞–ї–Є –ї–Є –њ—А–Њ–≤–µ–і–µ–љ–љ—Л–µ —А–∞–±–Њ—В—Л –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–є —А–µ–Ј—Г–ї—М—В–∞—В. –Ф–Є–∞–≥–љ–Њ—Б—В –Ї–Њ–љ—В—А–Њ–ї–Є—А—Г–µ—В —В—А–Є –Ї–ї—О—З–µ–≤—Л—Е –њ–∞—А–∞–Љ–µ—В—А–∞ — –Ї–∞—З–µ—Б—В–≤–Њ —Д–∞–Ї–µ–ї–∞ —А–∞—Б–њ—Л–ї–∞, –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В—М –Є –≥–µ—А–Љ–µ—В–Є—З–љ–Њ—Б—В—М.
–Я—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В—М –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ–Љ –њ—А–Њ—И–µ–і—И–µ–≥–Њ —З–µ—А–µ–Ј –Ї–∞–ґ–і—Г—О —Д–Њ—А—Б—Г–љ–Ї—Г —Б–Њ–ї—М–≤–µ–љ—В–∞ –Ј–∞ –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є. –Х—Б–ї–Є —Д–Њ—А—Б—Г–љ–Ї–Є –љ–µ –њ—А–Њ—И–ї–Є –Ї–Њ–љ—В—А–Њ–ї—М –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є –љ–∞ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Є–µ –Ј–∞–≤–Њ–і—Б–Ї–Є–Љ –њ–∞—А–∞–Љ–µ—В—А–∞–Љ –Є–ї–Є —А–∞–Ј–љ–Њ—Б—В—М –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є —Д–Њ—А—Б—Г–љ–Њ–Ї –±–Њ–ї–µ–µ 5% (–њ—А–Є –Њ—В—Б—Г—В—Б—В–≤–Є–Є –і–∞–љ–љ—Л—Е –Њ —В—А–µ–±—Г–µ–Љ–Њ–є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є), —В–Њ –њ–Њ—В—А–µ–±—Г–µ—В—Б—П –њ—А–Њ–і–Њ–ї–ґ–µ–љ–Є–µ –Љ–Њ–є–Ї–Є –Є–ї–Є –Ј–∞–Љ–µ–љ–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї.
–У–µ—А–Љ–µ—В–Є—З–љ–Њ—Б—В—М —Д–Њ—А—Б—Г–љ–Ї–Є –њ—А–Њ–≤–Њ–і–Є—В—Б—П –њ—Г—В–µ–Љ –њ–Њ–і–∞—З–Є –≤ –љ–µ–µ —Б–Њ–ї—М–≤–µ–љ—В–∞ –њ—А–Є –і–∞–≤–ї–µ–љ–Є–Є –љ–∞ 10% –±–Њ–ї—М—И–µ –љ–Њ–Љ–Є–љ–∞–ї—М–љ–Њ–≥–Њ –Є –Њ—В—Б—Г—В—Б—В–≤–Є–Є —Г–њ—А–∞–≤–ї—П—О—Й–Є—Е –Є–Љ–њ—Г–ї—М—Б–Њ–≤. –Я—А–Є —Н—В–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е –±–Њ–ї—М—И–Є–љ—Б—В–≤–Њ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї–µ–є —Д–Њ—А—Б—Г–љ–Њ–Ї –і–Њ–њ—Г—Б–Ї–∞—О—В –њ–Њ—П–≤–ї–µ–љ–Є–µ ¬Ђ–љ–∞ –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є¬ї –љ–µ –±–Њ–ї–µ–µ –Њ–і–љ–Њ–є –Ї–∞–њ–ї–Є —Б–Њ–ї—М–≤–µ–љ—В–∞ –≤ –Љ–Є–љ—Г—В—Г. –Э–µ–≥–µ—А–Љ–µ—В–Є—З–љ–∞—П —Д–Њ—А—Б—Г–љ–Ї–∞ –Љ–Њ–ґ–µ—В –±—Л—В—М –Њ–њ—П—В—М –њ–Њ–і–≤–µ—А–≥–љ—Г—В–∞ –њ—А–Њ–Љ—Л–≤–Ї–µ –Є–ї–Є –≤—Л–±—А–∞–Ї–Њ–≤—Л–≤–∞–µ—В—Б—П, –µ—Б–ї–Є –њ–Њ–≤—В–Њ—А–љ—Л–µ –њ—А–Њ–Љ—Л–≤–Ї–Є –љ–µ –њ—А–Є–≤–Њ–і—П—В –Ї —Г—Б–њ–µ—Е—Г.
–Я—А–Њ–Љ—Л–≤–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї –≤ –Ь–Є–љ—Б–Ї–µ
–Т –њ–Њ–Є—Б–Ї–∞—Е –Є–і–µ–∞–ї–∞
–Т–Њ–њ—А–Њ—Б –Њ —В–Њ–Љ, –Ї–∞–Ї–Њ–є –Є–Ј —Б–њ–Њ—Б–Њ–±–Њ–≤ –њ—А–Њ–Љ—Л–≤–Ї–Є —Д–Њ—А—Б—Г–љ–Њ–Ї –Њ–њ—В–Є–Љ–∞–ї–µ–љ –њ–Њ —Б–Њ–Њ—В–љ–Њ—И–µ–љ–Є—О ¬Ђ–Ј–∞—В—А–∞—В—Л/—Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В—М/–Ї–∞—З–µ—Б—В–≤–Њ¬ї, –љ–µ –Є–Љ–µ–µ—В –µ–і–Є–љ–Њ–≥–Њ —А–µ—И–µ–љ–Є—П. –Ъ–∞–ґ–і—Л–є —Б–ї—Г—З–∞–є —Г–љ–Є–Ї–∞–ї–µ–љ, –∞ –≤—Л–±–Њ—А –љ—Г–ґ–љ–Њ –і–µ–ї–∞—В—М, –Є—Б—Е–Њ–і—П –Є–Ј –Њ—Б–љ–∞—Й–µ–љ–љ–Њ—Б—В–Є –≤–∞—И–µ–≥–Њ —Б–µ—А–≤–Є—Б–∞, —Д–Є–љ–∞–љ—Б–Њ–≤—Л—Е –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є –Ї–ї–Є–µ–љ—В–∞ –Є ¬Ђ–і–Є–∞–≥–љ–Њ–Ј–∞¬ї –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П.
–Ш–і–µ–∞–ї—М–љ–Њ–є –Љ–Њ–ґ–µ—В –±—Л—В—М –Ї–Њ–Љ–±–Є–љ–∞—Ж–Є—П –љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е –Љ–µ—В–Њ–і–Њ–≤: —А–µ–≥—Г–ї—П—А–љ–Њ–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –Љ–Њ—О—Й–Є—Е –њ—А–Є—Б–∞–і–Њ–Ї, –і–Њ–±–∞–≤–ї—П–µ–Љ—Л—Е –≤ –±–µ–љ–Ј–Њ–±–∞–Ї, –њ—А–Њ—Д–Є–ї–∞–Ї—В–Є—З–µ—Б–Ї–∞—П –њ—А–Њ–Љ—Л–≤–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї –љ–∞ –і–≤—Г—Е–Ї–Њ–љ—В—Г—А–љ–Њ–є —Г—Б—В–∞–љ–Њ–≤–Ї–µ –±–µ–Ј –і–µ–Љ–Њ–љ—В–∞–ґ–∞ —З–µ—А–µ–Ј –Ї–∞–ґ–і—Л–µ 20-40 —В—Л—Б. –Ї–Љ –Є –њ—А–Њ–Љ—Л–≤–Ї–∞ —Б –і–µ–Љ–Њ–љ—В–∞–ґ–µ–Љ —З–µ—А–µ–Ј –Ї–∞–ґ –і—Л–µ 110-120 —В—Л—Б. –Ї–Љ –њ—А–Њ–±–µ–≥–∞.
–Э–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–Њ–Љ–љ–Є—В—М, —З—В–Њ –љ–∞ –Љ–љ–Њ–≥–Є—Е —В–Є–њ–∞—Е —Д–Њ—А—Б—Г–љ–Њ–Ї —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В—Б—П —Б–Љ–µ–љ–љ—Л–µ —Д–Є–ї—М—В—А—Л —В–Њ–љ–Ї–Њ–є –Њ—З–Є—Б—В–Ї–Є. –≠—В–Є —Д–Є–ї—М—В—А—Л, –∞ —В–∞–Ї–ґ–µ —Б—К–µ–Љ–љ—Л–µ –Ї–Њ–ї–њ–∞—З–Ї–Є –≤ —А–∞–±–Њ—З–µ–є —З–∞—Б—В–Є —Д–Њ—А—Б—Г–љ–Њ–Ї, –њ–Њ—Б–ї–µ –њ—А–Њ–Љ—Л–≤–Ї–Є —А–µ–Ї–Њ–Љ–µ–љ–і—Г–µ—В—Б—П —Б–Љ–µ–љ–Є—В—М –љ–∞ –љ–Њ–≤—Л–µ, –Ї–∞–Ї–Њ–є –±—Л —Б–њ–Њ—Б–Њ–± —З–Є—Б—В–Ї–Є —Д–Њ—А—Б—Г–љ–Њ–Ї –≤—Л –љ–µ –≤—Л–±—А–∞–ї–Є.
–Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –і–ї—П –Ј–∞–Ї—А–µ–њ–ї–µ–љ–Є—П —А–µ–Ј—Г–ї—М—В–∞—В–∞ —А–µ–Ї–Њ–Љ–µ–љ–і—Г–µ—В—Б—П –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–∞—П –њ—А–Њ–Љ—Л–≤–Ї–∞ –±–µ–љ–Ј–Њ–±–∞–Ї–∞, –±–µ–љ–Ј–Њ–њ—А–Њ–≤–Њ–і–Њ–≤ –Є —В–Њ–њ–ї–Є–≤–љ–Њ–є —А–µ–є–Ї–Є. –Х—Б–ї–Є —Н—В–Њ–≥–Њ –љ–µ —Б–і–µ–ї–∞—В—М –Є —В–Њ–њ–ї–Є–≤–Њ–њ–Њ–і–∞—О—Й–Є–µ –Љ–∞–≥–Є—Б—В—А–∞–ї–Є –Њ—Б—В–∞–љ—Г—В—Б—П –≥—А—П–Ј–љ—Л–Љ–Є, —В–Њ –≤ –Ї–Њ—А–Њ—В–Ї–Є–є —Б—А–Њ–Ї —Д–Њ—А—Б—Г–љ–Ї–Є –Њ–њ—П—В—М –Ј–∞—Б–Њ—А—П—В—Б—П –Є –љ–µ–і–Њ–≤–Њ–ї—М–љ—Л–є –Ї–ї–Є–µ–љ—В –Њ–Ї–∞–ґ–µ—В—Б—П –љ–∞ –≤–∞—И–µ–Љ –њ–Њ—А–Њ–≥–µ.
–Я—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ = –і–Њ–≤–Њ–ї–µ–љ
–Я–µ—А–≤–Њ–µ, —З—В–Њ –і–Њ–ї–ґ–µ–љ —Б–і–µ–ї–∞—В—М –ї—О–±–Њ–є –Љ–∞—Б—В–µ—А –њ–µ—А–µ–і –љ–∞—З–∞–ї–Њ–Љ —А–∞–±–Њ—В –њ–Њ –Њ—З–Є—Б—В–Ї–µ —Д–Њ—А—Б—Г–љ–Њ–Ї — —Н—В–Њ –њ–Њ–≥–Њ–≤–Њ—А–Є—В—М —Б –Ї–ї–Є–µ–љ—В–Њ–Љ. –Ъ–ї–Є–µ–љ—В—Г –љ—Г–ґ–љ–Њ —З–µ—В–Ї–Њ –Є –і–Њ—Е–Њ–і—З–Є–≤–Њ –Њ–±—К—П—Б–љ–Є—В—М, —З—В–Њ –њ—А–Њ–Љ—Л–≤–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї — —Н—В–Њ –љ–µ –њ–∞–љ–∞—Ж–µ—П, –∞ –≤—Б–µ–≥–Њ –ї–Є—И—М –љ–µ–Њ–±—Е–Њ–і–Є–Љ–∞—П –Є –њ–Њ–ї–µ–Ј–љ–∞—П –њ—А–Њ—Д–Є–ї–∞–Ї—В–Є–Ї–∞.
–£—В–≤–µ—А–ґ–і–∞—В—М, —З—В–Њ –≤—Б–µ –њ—А–Њ–±–ї–µ–Љ—Л —В–Њ–њ–ї–Є–≤–Њ–њ–Њ–і–∞—О—Й–µ–є —Б–Є—Б—В–µ–Љ—Л –±—Г–і—Г—В —А–µ—И–µ–љ—Л –њ–Њ –Љ–∞–љ–Њ–≤–µ–љ–Є—О —Н—В–Њ–є ¬Ђ–≤–Њ–ї—И–µ–±–љ–Њ–є –њ–∞–ї–Њ—З–Ї–Є¬ї, –љ–µ–ї—М–Ј—П, –Є–љ–∞—З–µ —Г–±–µ–ґ–і–µ–љ–љ—Л–є –≤ –Њ–±—А–∞—В–љ–Њ–Љ –Ї–ї–Є–µ–љ—В —З–µ—А–µ–Ј –Ї–∞–Ї–Њ–µ –≤—А–µ–Љ—П –±—Г–і–µ—В –≤–њ—А–∞–≤–µ –њ—А–µ–і—К—П–≤–Є—В—М –≤–∞—И–µ–Љ—Г —Б–µ—А–≤–Є—Б—Г –њ—А–µ—В–µ–љ–Ј–Є–Є –Ї –Ї–∞—З–µ—Б—В–≤—Г —А–µ–Љ–Њ–љ—В–∞. –Ъ–ї–Є–µ–љ—В –і–Њ–ї–ґ–µ–љ –Ј–љ–∞—В—М, —З—В–Њ –њ—А–Њ–Љ—Л–≤–Ї–∞ —Д–Њ—А—Б—Г–љ–Њ–Ї — —Н—В–Њ –≤ —Б–≤–Њ–µ–Љ —А–Њ–і–µ ¬Ђ—Д–Є–Ј–Ј–∞—А—П–і–Ї–∞¬ї –і–ї—П —В–Њ–њ–ї–Є–≤–Њ–њ–Њ–і–∞—О—Й–µ–є —Б–Є—Б—В–µ–Љ—Л, –љ–Њ –µ—Б–ї–Є –Њ–љ–∞ –љ–µ —А–µ—И–Є—В –Є–Љ–µ—О—Й–Є—Е—Б—П –њ—А–Њ–±–ї–µ–Љ, —В–Њ –њ–Њ—В—А–µ–±—Г–µ—В—Б—П –±–Њ–ї–µ–µ –≥–ї—Г–±–Њ–Ї–Є–є —А–µ–Љ–Њ–љ—В.
–Я–∞—А–Ї—В—А–Њ–љ–Є–Ї, –∞–Ї—Г—Б—В–Є—З–µ—Б–Ї–∞—П –њ–∞—А–Ї–Њ–≤–Њ—З–љ–∞—П —Б–Є—Б—В–µ–Љ–∞, –њ–∞—А–Ї–Њ–≤–Њ—З–љ—Л–є —А–∞–і–∞—А –ї–Є–±–Њ —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–є –і–∞—В—З–Є–Ї –њ–∞—А–Ї–Њ–≤–Ї–Є вАФ –Њ–њ–Є—Б–∞–љ–Є–µ, –њ—А–Є–љ—Ж–Є–њ —А–∞–±–Њ—В—Л
–Я–∞—А–Ї—В—А–Њ–љ–Є–Ї, –∞–Ї—Г—Б—В–Є—З–µ—Б–Ї–∞—П –њ–∞—А–Ї–Њ–≤–Њ—З–љ–∞—П —Б–Є—Б—В–µ–Љ–∞, –њ–∞—А–Ї–Њ–≤–Њ—З–љ—Л–є —А–∞–і–∞—А –ї–Є–±–Њ —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–є –і–∞—В—З–Є–Ї –њ–∞—А–Ї–Њ–≤–Ї–Є вАФ –Њ–њ–Є—Б–∞–љ–Є–µ, –њ—А–Є–љ—Ж–Є–њ —А–∞–±–Њ—В—Л

–Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ
–Я–∞—А–Ї—В—А–Њ–љ–Є–Ї, –і—А—Г–≥–Є–µ –љ–∞–Ј–≤–∞–љ–Є—П вАФ –∞–Ї—Г—Б—В–Є—З–µ—Б–Ї–∞—П –њ–∞—А–Ї–Њ–≤–Њ—З–љ–∞—П —Б–Є—Б—В–µ–Љ–∞, –њ–∞—А–Ї–Њ–≤–Њ—З–љ—Л–є —А–∞–і–∞—А –ї–Є–±–Њ —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–є –і–∞—В—З–Є–Ї –њ–∞—А–Ї–Њ–≤–Ї–Є вАФ —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ–∞—П –љ–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е –Ї–∞–Ї –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–∞—П –Њ–њ—Ж–Є—П –Є —А–∞–±–Њ—В–∞–µ—В –Ї–∞–Ї –≤—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ–∞—П —Б–Є—Б—В–µ–Љ–∞ –њ–∞—А–Ї–Њ–≤–Ї–Є.
–Ю—Б–љ–Њ–≤–љ—Л–Љ –Љ–µ—Е–∞–љ–Є–Ј–Љ–Њ–Љ –і–∞–љ–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л —П–≤–ї—П—О—В—Б—П —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤—Л–µ –і–∞—В—З–Є–Ї–Є, –Ї–Њ—В–Њ—А—Л–µ –≤—Б—В—А–∞–Є–≤–∞—О—В—Б—П –≤ –Ј–∞–і–љ–Є–є –Є –њ–µ—А–µ–і–љ–Є–µ –±–∞–Љ–њ–µ—А–∞ –Є —Б–ї—Г–ґ–∞—В –і–ї—П –Ї–Њ–љ—В—А–Њ–ї—П —А–∞—Б—Б—В–Њ—П–љ–Є—П –Ї –±–ї–Є–Ј–Ї–Њ —Б—В–Њ—П—Й–Є–Љ –Њ–±—К–µ–Ї—В–∞–Љ –њ–Њ —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–Љ—Г —Б–Є–≥–љ–∞–ї—Г, –Ї–Њ—В–Њ—А—Л–є –±—Л–ї –Њ—В—А–∞–ґ—С–љ –Њ—В –љ–Є—Е. –°–Є—Б—В–µ–Љ–∞ –Є–љ—Д–Њ—А–Љ–Є—А—Г–µ—В –Њ –њ—А–Є–±–ї–Є–ґ–µ–љ–Є–Є –Њ–±—К–µ–Ї—В–∞ –њ—А–µ–і—Г–њ—А–µ–ґ–і–∞—О—Й–Є–Љ –Ј–≤—Г–Ї–Њ–≤—Л–Љ —Б–Є–≥–љ–∞–ї–Њ–Љ –ї–Є–±–Њ –Њ—В–Њ–±—А–∞–ґ–µ–љ–Є–µ–Љ –і–Є—Б—В–∞–љ—Ж–Є–Є –љ–∞ –і–Є—Б–њ–ї–µ–µ, –Ї–Њ—В–Њ—А—Л–є –Љ–Њ–ґ–µ—В –±—Л—В—М –≤—Б—В—А–Њ–µ–љ –≤ —В–Њ—А–њ–µ–і—Г, –≤ –Ј–µ—А–Ї–∞–ї–∞ –Ј–∞–і–љ–µ–≥–Њ –≤–Є–і–∞ –ї–Є–±–Њ –Љ–Њ–љ—В–Є—А–Њ–≤–∞—В—М—Б—П –Њ—В–і–µ–ї—М–љ–Њ.
–Я–Њ—З–µ–Љ—Г вАУ вАЬ–Я–∞—А–Ї—В—А–Њ–љ–Є–ЇвАЭ ?
–Я–µ—А–≤—Л–µ –њ–∞—А–Ї–Њ–≤–Њ—З–љ—Л–µ —А–∞–і–∞—А—Л –≤ –†–Њ—Б—Б–Є–Є –њ—А–Њ–і–∞–≤–∞–ї–Є –њ–Њ–і –Љ–∞—А–Ї–Њ–є –Я–∞—А–Ї—В—А–Њ–љ–Є–Ї, —В–∞–Ї –љ–∞–Ј—Л–≤–∞—О—В –њ–∞—А–Ї–Њ–≤–Њ—З–љ—Г—О —Б–Є—Б—В–µ–Љ—Г –љ–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е –Ь–µ—А—Б–µ–і–µ—Б –С–µ–љ—Ж. –≠—В–Њ –љ–∞–Ј–≤–∞–љ–Є–µ —В–∞–Ї –≥–ї—Г–±–Њ–Ї–Њ –≤–Њ—И–ї–Њ –≤ —А–∞–Ј–≥–Њ–≤–Њ—А–љ—Г—О —А—Г—Б—Б–Ї—Г—О —А–µ—З—М, —З—В–Њ —Б–ї–Њ–≤–Њ–Љ –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї —Б—В–∞–ї–Є –љ–∞–Ј—Л–≤–∞—В—М –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Є –≤—Б–µ –њ–∞—А–Ї–Њ–≤–Њ—З–љ—Л–µ —А–∞–і–∞—А—Л, –љ–µ –Њ–±—А–∞—Й–∞—П –і–∞–ґ–µ –≤–љ–Є–Љ–∞–љ–Є—П —З—В–Њ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М —Б–Њ–≤—Б–µ–Љ –і—А—Г–≥–Њ–є. –Ф—А—Г–≥–Є–µ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї–Є –Є—Б–њ–Њ–ї—М–Ј—Г—О—В –Ї–∞–Ї —А–∞–Ј –і—А—Г–≥–Є–µ –љ–∞–Ј–≤–∞–љ–Є—П: –Ї –њ—А–Є–Љ–µ—А—Г, –С–Ь–Т –Є –Р—Г–і–Є –љ–∞ –љ–µ–Љ–µ—Ж–Ї–Њ–Љ —П–Ј—Л–Ї–µ вАФ Parkassistent —З—В–Њ –≤ –њ–µ—А–µ–≤–Њ–і–µ –Њ–Ј–љ–∞—З–∞–µ—В ¬Ђ–њ–Њ–Љ–Њ—Й—М—О –њ—А–Є –њ–∞—А–Ї–Њ–≤–Ї–µ¬ї. –Р—Г–і–Є –≤ –і–Њ–±–∞–≤–Њ–Ї –Ї —Н—В–Њ–Љ—Г –≤–≤–µ–ї–Њ —Б–Њ–Ї—А–∞—Й–µ–љ–Є–µ APS, –Ї–Њ—В–Њ—А–Њ–µ —А–∞—Б—И–Є—Д—А–Њ–≤—Л–≤–∞–µ—В—Б—П –љ–∞ –љ–µ–Љ–µ—Ж–Ї–Њ–Љ –Ї–∞–Ї Audi Parkassistenzsysteme –Є Audi parking system –љ–∞ –∞–љ–≥–ї–Є–є—Б–Ї–Њ–Љ. –£ –Ю–њ–µ–ї—М —Н—В–Њ ¬Ђ–Я–∞—А–Ї–Њ–≤–Њ—З–љ—Л–є –њ–Є–ї–Њ—В¬ї.
–Я—А–Є–љ—Ж–Є–њ —А–∞–±–Њ—В—Л –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞
–Я–∞—А–Ї–Њ–≤–Њ—З–љ—Л–є —А–∞–і–∞—А —Б–Њ—Б—В–Њ–Є—В –Є–Ј :
вАҐ —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –±–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П
вАҐ –Є–Ј–ї—Г—З–∞—В–µ–ї–Є вАФ —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤—Л–µ –і–∞—В—З–Є–Ї–Є
вАҐ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Њ–њ–Њ–≤–µ—Й–µ–љ–Є—П вАФ –і–Є—Б–њ–ї–µ–є, –Ј—Г–Љ–Љ–µ—А–∞
–Я—А–Є–љ—Ж–Є–њ —А–∞–±–Њ—В—Л –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞ –∞–љ–∞–ї–Њ–≥–Є—З–µ–љ —А–∞–±–Њ—В–µ —Н—Е–Њ–ї–Њ—В–∞. –°–Є—Б—В–µ–Љ–Њ–є –њ–Њ—Б—Л–ї–∞–µ—В—Б—П —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–є –Є–Љ–њ—Г–ї—М—Б —Б–≥–µ–љ–µ—А–Є—А–Њ–≤–∞–љ–љ—Л–Љ –і–∞—В—З–Є–Ї–Њ–Љ вАФ –Є–Ј–ї—Г—З–∞—В–µ–ї–µ–Љ (–Њ–Ї–Њ–ї–Њ 4O –Ї–У—Ж) –њ—А–Є –њ—А–Њ—Е–Њ–ґ–і–µ–љ–Є–Є –љ–µ–Ї–Њ—В–Њ—А–Њ–≥–Њ —А–∞—Б—Б—В–Њ—П–љ–Є—П –Є–Љ–њ—Г–ї—М—Б –Њ—В—А–∞–ґ–∞–µ—В—Б—П –Њ—В –љ–∞—Е–Њ–і—П—Й–Є—Е—Б—П –љ–∞ –µ–≥–Њ –њ—Г—В–Є –Њ–±—К–µ–Ї—В–Њ–≤, –њ—А–Є —Н—В–Њ–Љ –±–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Ј–∞–Љ–µ—А—П–µ—В –≤—А–µ–Љ—П, –Ј–∞ –Ї–Њ—В–Њ—А–Њ–µ –Є–Љ–њ—Г–ї—М—Б –њ—А–Њ—И–µ–ї –њ—Г—В—М —В—Г–і–∞ –Є –Њ–±—А–∞—В–љ–Њ —А–∞—Б—Б—З–Є—В—Л–≤–∞–µ—В —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ –њ—А–µ–і–Љ–µ—В–∞. –Х—Б–ї–Є –≤ —Б–Є—Б—В–µ–Љ–µ –Є–Љ–µ–µ—В—Б—П –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –і–∞—В—З–Є–Ї–Њ–≤, —В–Њ —Б–Є—Б—В–µ–Љ–∞ –Њ–њ—А–∞—И–Є–≤–∞–µ—В –Є—Е –њ–Њ–Њ—З–µ—А–µ–і–љ–Њ –Є –њ–Њ—Б–ї–µ –≤—Л–≤–Њ–і–Є—В –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Њ–± —Г–і–∞–ї–µ–љ–љ—Л—Е –Њ–±—К–µ–Ї—В–∞—Е –љ–∞ –і–Є—Б–њ–ї–µ–є –ї–Є–±–Њ –њ–Њ–і–∞–µ—В –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л–є –њ—А–µ–і—Г–њ—А–µ–ґ–і–∞—О—Й–Є–є —Б–Є–≥–љ–∞–ї –Ј—Г–Љ–Љ–µ—А–Њ–Љ. –І–∞—Б—В–Њ—В–∞ –њ—А–µ–і—Г–њ—А–µ–ґ–і–∞—О—Й–µ–≥–Њ —Б–Є–≥–љ–∞–ї–∞ –Ј—Г–Љ–Љ–µ—А–∞ –њ–Њ–≤—Л—И–∞–µ—В—Б—П –њ–Њ –Љ–µ—А–µ –њ—А–Є–±–ї–Є–ґ–µ–љ–Є–µ –Ї –Њ–±—К–µ–Ї—В—Г. –Я–µ—А–≤—Л–µ –Ј–≤—Г–Ї–Є –Ј—Г–Љ–Љ–µ—А–∞, –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї –љ–∞—З–Є–љ–∞–µ—В –Є–Ј–і–∞–≤–∞—В—М, –Ї–Њ–≥–і–∞ –њ—А–µ–њ—П—В—Б—В–≤–Є–µ –љ–∞—Е–Њ–і–Є—В—М—Б—П –≤ –њ—А–µ–і–µ–ї–∞—Е –Њ–і–љ–Њ–≥–Њ вАУ –і–≤—Г—Е –Љ–µ—В—А–∞, –∞ –Љ–Є–љ–Є–Љ–∞–ї—М–љ–Њ–µ –Њ–њ–∞—Б–љ–Њ–µ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї —Б—З–Є—В–∞–µ—В 1–Ю-4–Ю —Б–Љ (–≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—П) –њ—А–Є —Н—В–Њ–Љ –Ј–≤—Г–Ї–Њ–≤–Њ–є —Б–Є–≥–љ–∞–ї –Ј–≤—Г—З–Є—В –љ–µ–њ—А–µ—А—Л–≤–љ–Њ. –Ю–±—Л—З–љ–Њ, —Б–Є—Б—В–µ–Љ–∞ –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞ —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–љ–∞—П –≤ –Ј–∞–і–љ–µ–Љ –±–∞–Љ–њ–µ—А–µ, –∞–Ї—В–Є–≤–Є–Ј–Є—А—Г–µ—В—Б—П —Б –≤–Ї–ї—О—З–µ–љ–Є–µ–Љ –Ј–∞–і–љ–µ–є –њ–µ—А–µ–і–∞—З–µ–є, –∞ –≤ –њ–µ—А–µ–і–љ–µ–Љ –±–∞–Љ–њ–µ—А–µ —Б–Є—Б—В–µ–Љ–∞ –∞–Ї—В–Є–≤–Є–Ј–Є—А—Г–µ—В—Б—П –њ—А–Є –Љ–∞–ї–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –і–Њ 2–Ю –Ї–Љ/—З.
–Э–µ—Б–Ї–Њ–ї—М–Ї–Њ —Б–њ–Њ—Б–Њ–±–Њ–≤ –Љ–Њ–љ—В–Є—А–Њ–≤–∞–љ–Є—П –і–∞—В—З–Є–Ї–Њ–≤ –≤ –±–∞–Љ–њ–µ—А.
–Т—А–µ–Ј–љ—Л–µ –і–∞—В—З–Є–Ї–Є.
–Э–∞–Ј–≤–∞–љ–Є–µ –≥–Њ–≤–Њ—А–Є—В —Б–∞–Љ–Њ –Ј–∞ —Б–µ–±—П. –Ф–ї—П –љ–∞—З–∞–ї–∞ –≤—Л—Б–≤–µ—А–ї–Є–≤–∞—О—В –Њ—В–≤–µ—А—Б—В–Є—П –≤ –±–∞–Љ–њ–µ—А–µ –њ–Њ–і –і–Є–∞–Љ–µ—В—А —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ–Љ—Л—Е –і–∞—В—З–Є–Ї–Њ–≤. –Ч–∞—В–µ–Љ –≤ —Н—В–Є –Њ—В–≤–µ—А—Б—В–Є—П —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В –і–∞—В—З–Є–Ї–Є –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞. –≠—В–Њ —Б–∞–Љ–Њ —И–Є—А–Њ–Ї–Њ —А–∞—Б–њ—А–Њ—Б—В—А–∞–љ–µ–љ–љ—Л–є —Б–њ–Њ—Б–Њ–± —Г—Б—В–∞–љ–Њ–≤–Ї–Є –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞ –Ї–∞–Ї –љ–∞ –°–Ґ–Ю —В–∞–Ї –Є –≤ —Б–Њ–±—Б—В–≤–µ–љ–љ–Њ–Љ –≥–∞—А–∞–ґ–µ.
–Э–∞–Ї–ї–∞–і–љ—Л–µ –і–∞—В—З–Є–Ї–Є.
–°–∞–Љ—Л–є –і–Њ—Б—В—Г–њ–љ—Л–є –Є –і–µ—И–µ–≤—Л–є —Б–њ–Њ—Б–Њ–± —Г—Б—В–∞–љ–Њ–≤–Ї–Є –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞. –Ф–∞—В—З–Є–Ї–Є –њ—А–Њ—Б—В–Њ –њ—А–Є–Ї–ї–µ–Є–≤–∞—О—В—Б—П –љ–∞ –±–∞–Љ–њ–µ—А –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –Я—А–Њ—Б—В–Њ—В–∞ –Є –ї–µ–≥–Ї–Њ—Б—В—М –Є—Е —Г—Б—В–∞–љ–Њ–≤–Ї–Є –Њ–±—К—П—Б–љ—П–µ—В –Є—Е –Љ–∞–ї—Г—О —Б—В–Њ–Є–Љ–Њ—Б—В—М –љ—Г –Є —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–µ–љ–љ–Њ –Ї–∞—З–µ—Б—В–≤–Њ.
–Т–∞–ґ–љ–Њ –њ–Њ–Љ–љ–Є—В—М!!! –Я–∞—А–Ї—В—А–Њ–љ–Є–Ї –Љ–Њ–ґ–µ—В –ї–Њ–ґ–љ–Њ —Б—А–∞–±–∞—В—Л–≤–∞—В—М –≤ –љ–Є–ґ–µ–њ–µ—А–µ—З–Є—Б–ї–µ–љ–љ—Л—Е —Б–ї—Г—З–∞—П—Е: –Х—Б–ї–Є –љ–µ–њ–Њ—Б—А–µ–і—Б—В–≤–µ–љ–љ–Њ –љ–∞ —Б–∞–Љ–Њ–Љ –і–∞—В—З–Є–Ї–µ –Њ–±—А–∞–Ј–Њ–≤–∞–ї—Б—П –ї–µ–і, —Б–љ–µ–≥, –≥—А—П–Ј—М –Є —В.–і. –Х—Б–ї–Є –≤ –њ—А–µ–і–µ–ї–∞—Е —А–∞–і–Є—Г—Б–∞ –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞ –Є–Љ–µ—О—В—Б—П –њ–Њ–≤—Л—И–µ–љ–љ—Л–µ –Є—Б—В–Њ—З–љ–Є–Ї–Є —И—Г–Љ–∞. –Х—Б–ї–Є –≤ –њ—А–µ–і–µ–ї–∞—Е —А–∞–і–Є—Г—Б–∞ –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞ –Є–Љ–µ—О—В—Б—П —А–∞–і–Є–Њ–њ–µ—А–µ–і–∞—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Я–∞—А–Ї—В—А–Њ–љ–Є–Ї –Љ–Њ–ґ–µ—В –і–∞–≤–∞—В—М –Њ—И–Є–±–Њ—З–љ—Л–µ –і–∞–љ–љ—Л–µ –љ–∞ —Г–Ї–ї–Њ–љ–∞—Е, –љ–∞ –і–Њ—А–Њ–≥–µ —Б –≥—А—Г–љ—В–Њ–≤—Л–Љ –њ–Њ–Ї—А—Л—В–Є–µ–Љ –ї–Є–±–Њ –љ–∞ –і–Њ—А–Њ–≥–µ —Б –љ–µ—А–Њ–≤–љ–Њ—Б—В—П–Љ–Є. –Я—А–Є –±—Г–Ї—Б–Є—А–Њ–≤–Ї–µ –њ—А–Є—Ж–µ–њ–∞ –ї–Є–±–Њ –і—А—Г–≥–Њ–≥–Њ —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–≥–Њ —Б—А–µ–і—Б—В–≤–∞ –Ј–∞—В—А—Г–і–љ—П–µ—В —А–∞–±–Њ—В—Г –њ–∞—А–Ї—В—А–Њ–љ–Є–Ї–∞ –Я—А–Є –њ–∞—А–Ї–Њ–≤–Ї–µ –≤ –Њ—З–µ–љ—М –Љ–∞–ї—Л—Е –ї–Є–±–Њ —Г–Ј–Ї–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е, —Б—А–∞–±–∞—В—Л–≤–∞–µ—В —Н—Д—Д–µ–Ї—В —Н—Е–∞ –Я–∞—А–Ї—В—А–Њ–љ–Є–Ї –Љ–Њ–ґ–µ—В –≤–Њ–Њ–±—Й–µ –љ–µ —Г–≤–Є–і–µ—В—М –љ–∞ —Б–ї–µ–і—Г—О—Й–Є–µ –Њ–±—К–µ–Ї—В—Л: –Я—А–µ–і–Љ–µ—В—Л, –Ї–Њ—В–Њ—А—Л–Љ —Б–≤–Њ–є—Б—В–≤–µ–љ–љ–Њ –њ–Њ–≥–ї–Њ—Й–∞—В—М —Г–ї—М—В—А–∞–Ј–≤—Г–Ї–Њ–≤–Њ–µ –Є–Ј–ї—Г—З–µ–љ–Є–µ (—В–Ї–∞–љ—М, –њ–Њ—А–Є—Б—В—Л–µ –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є –Є —В.–і.). –Ю–±—К–µ–Ї—В—Л –≤—Л—Б–Њ—В–∞ –Ї–Њ—В–Њ—А—Л—Е —Б–Њ—Б—В–∞–≤–ї—П–µ—В –Љ–µ–љ–µ–µ –Њ–і–љ–Њ–≥–Њ –Љ–µ—В—А–∞. –Ю–±—К–µ–Ї—В—Л, –Њ—В—А–∞–ґ–∞—О—Й–Є–µ —Б–Є–≥–љ–∞–ї—Л –≤ –і—А—Г–≥—Г—О —Б—В–Њ—А–Њ–љ—Г –Њ—В –і–∞—В—З–Є–Ї–Њ–≤. –ѓ–Љ—Л, –≤—Л–±–Њ–Є–љ—Л, –Ї–Њ–ї–Њ–і—Ж—Л, –Љ–µ–ї–Ї–Є–µ –њ—А–µ–і–Љ–µ—В—Л
–Ф–∞—В—З–Є–Ї –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞
–Ф–∞—В—З–Є–Ї –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞
–Я—А–Є–Љ–µ–љ–µ–љ–Є–µ
–Т –Љ–∞–ї–Њ–ї–Є—В—А–∞–ґ–љ—Л—Е, –Ї–Њ–Љ–њ–∞–Ї—В–љ—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е –≤—Б–µ —З–∞—Й–µ —Б—В–∞–ї–Є –њ—А–Є–Љ–µ–љ—П—В—М —Н–ї–µ–Ї—В—А–Њ–Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є–µ —Г—Б–Є–ї–Є—В–µ–ї–Є —А—Г–ї–µ–≤—Л—Е –Љ–µ—Е–∞–љ–Є–Ј–Љ–Њ–≤. –Ш—Е –Њ—Б–љ–Њ–≤–љ—Л–Љ–Є –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞–Љ–Є —П–≤–ї—П—О—В—Б—П –њ—А–Њ—Б—В–Њ—В–∞ —Г—Б—В–∞–љ–Њ–≤–Ї–Є –Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П, —Б–Њ–Ї—А–∞—Й–µ–љ–Є–µ —Н–љ–µ—А–≥–Њ–Ј–∞—В—А–∞—В –Є –њ–Њ–≤—Л—И–µ–љ–Є—О –Ї–Њ–Љ—Д–Њ—А—В–∞ –Є –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є.
–Ъ–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П –Є –њ—А–Є–љ—Ж–Є–њ –і–µ–є—Б—В–≤–Є—П
–Ф–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –љ–∞–Љ–µ—А–µ–љ–Є—П –≤–Њ–і–Є—В–µ–ї—П —Н–ї–µ–Ї—В—А–Њ–Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є–є —А—Г–ї–µ–≤–Њ–є –Љ–µ—Е–∞–љ–Є–Ј–Љ –і–Њ–ї–ґ–µ–љ –Њ–±–ї–∞–і–∞—В—М —Б–њ–Њ—Б–Њ–±–љ–Њ—Б—В—М—О –Є–Ј–Љ–µ—А—П—В—М –Ї—А—Г—В—П—Й–Є–є –Љ–Њ–Љ–µ–љ—В, –Ј–∞–і–∞–љ–љ—Л–є –≤–Њ–і–Є—В–µ–ї–µ–Љ. –Т —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —Б–µ—А–Є–є–љ—Л—Е –і–∞—В—З–Є–Ї–∞—Е, –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–љ—Л—Е –і–ї—П —Н—В–Є—Е —Ж–µ–ї–µ–є, –≤ –≤–∞–ї–µ —Б–Њ—И–Ї–Є —А—Г–ї–µ–≤–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ —В–Њ—А—Б–Є–Њ–љ, –Ї–Њ—В–Њ—А—Л–є –≤ –Љ–Њ–Љ–µ–љ—В –њ–Њ–≤–Њ—А–Њ—В–∞ —А—Г–ї–µ–≤–Њ–≥–Њ –Ї–Њ–ї–µ—Б–∞ –Ј–∞–Ї—А—Г—З–Є–≤–∞–µ—В—Б—П. –Ъ—А—Г—З–µ–љ–Є–µ –Љ–Њ–ґ–љ–Њ –Є–Ј–Љ–µ—А–Є—В—М —Б –њ–Њ–Љ–Њ—Й—М—О —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–Є—Е –Є–љ—Б—В—А—Г–Љ–µ–љ—В–Њ–≤ –Є –њ—А–µ–Њ–±—А–∞–Ј–Њ–≤–∞—В—М –µ–≥–Њ –≤ —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–µ —Б–Є–≥–љ–∞–ї—Л. –Э–µ–Њ–±—Е–Њ–і–Є–Љ—Л–є –і–Є–∞–њ–∞–Ј–Њ–љ –Є–Ј–Љ–µ—А–µ–љ–Є–є –і–∞—В—З–Є–Ї–∞ –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞, –Є—Б–њ–Њ–ї—М–Ј—Г—О—Й–µ–≥–Њ—Б—П –≤ —Н–ї–µ–Ї—В—А–Њ–Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є—Е —А—Г–ї–µ–≤—Л—Е –Љ–µ—Е–∞–љ–Є–Ј–Љ–∞—Е, —Б–Њ—Б—В–∞–≤–ї—П–µ—В –Њ–±—Л—З–љ–Њ –њ—А–Є–Љ–µ—А–љ–Њ –Њ—В ¬± 8 –і–Њ ¬± 10 –Э–Љ. –Т —Ж–µ–ї—П—Е –Ј–∞—Й–Є—В—Л —Б–њ–ї–Њ—И–љ–Њ–≥–Њ —В–Њ—А—Б–Є–Њ–љ–∞ –Њ—В –њ–µ—А–µ–≥—А—Г–Ј–Ї–Є –Є–ї–Є —А–∞–Ј—А—Г—И–µ–љ–Є—П –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ—Л–є —Г–≥–Њ–ї –Ї—А—Г—З–µ–љ–Є—П –≤–Њ–Ї—А—Г–≥ —Н–ї–µ–Љ–µ–љ—В–∞ —Б—Ж–µ–њ–ї–µ–љ–Є—П –Њ–≥—А–∞–љ–Є—З–Є–≤–∞–µ—В—Б—П –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є. –І—В–Њ–±—Л –Є–Љ–µ—В—М –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –Є–Ј–Љ–µ—А–Є—В—М –Ї—А—Г—З–µ–љ–Є–µ –Є –≤–Њ–Ј–љ–Є–Ї–∞—О—Й–Є–є –≤ —А–µ–Ј—Г–ї—М—В–∞—В–µ –љ–µ–≥–Њ –Ї—А—Г—В—П—Й–Є–є –Љ–Њ–Љ–µ–љ—В, —Б –Њ–і–љ–Њ–є —Б—В–Њ—А–Њ–љ—Л —В–Њ—А—Б–Є–Њ–љ–∞ —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В –Љ–∞–≥–љ–Є—В–Њ—А–µ–Ј–Є—Б—В–Є–≤–љ—Л–є –і–∞—В—З–Є–Ї, –Ї–Њ—В–Њ—А—Л–є —Б—З–Є—В—Л–≤–∞–µ—В –њ–Њ–ї–µ –Љ–∞–≥–љ–Є—В–љ–Њ–≥–Њ –Љ—Г–ї—М—В–Є–њ–Њ–ї—О—Б–љ–Њ–≥–Њ –Ї–Њ–ї–µ—Б–∞, –Ј–∞–Ї—А–µ–њ–ї–µ–љ–љ–Њ–≥–Њ —Б –і—А—Г–≥–Њ–є —Б—В–Њ—А–Њ–љ—Л. –Ъ–Њ–ї–Є—З–µ—Б—В–≤–Њ –њ–Њ–ї—О—Б–Њ–≤ —Н—В–Њ–≥–Њ –Ї–Њ–ї–µ—Б–∞ –≤—Л–±—А–∞–љ–Њ —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —З—В–Њ–±—Л –і–∞—В—З–Є–Ї –≤ –њ—А–µ–і–µ–ї–∞—Е —Б–≤–Њ–µ–≥–Њ –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–≥–Њ –і–Є–∞–њ–∞–Ј–Њ–љ–∞ –Є–Ј–Љ–µ—А–µ–љ–Є–є –Њ—В–њ—А–∞–≤–ї—П–ї –Њ–і–љ–Њ–Ј–љ–∞—З–љ—Л–є —Б–Є–≥–љ–∞–ї, –љ–Њ, –≤–Љ–µ—Б—В–µ —Б —В–µ–Љ, –≤ –ї—О–±–Њ–µ –≤—А–µ–Љ—П —Б—Г—Й–µ—Б—В–≤–Њ–≤–∞–ї–∞ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –њ–Њ–ї—Г—З–µ–љ–Є—П –Њ–і–љ–Њ–Ј–љ–∞—З–љ–Њ–≥–Њ –њ–Њ–Ї–∞–Ј–∞–љ–Є—П –њ–Њ –њ—А–Є–ї–∞–≥–∞–µ–Љ–Њ–Љ—Г –Ї—А—Г—В—П—Й–µ–Љ—Г –Љ–Њ–Љ–µ–љ—В—Г. –Ш—Б–њ–Њ–ї—М–Ј—Г–µ–Љ—Л–є –Љ–∞–≥–љ–Є—В–Њ—А–µ–Ј–Є—Б—В–Є–≤–љ—Л–є –і–∞—В—З–Є–Ї –њ–Њ–і–∞–µ—В –і–≤–∞ —Б–Є–≥–љ–∞–ї–∞ –≤ –і–Є–∞–њ–∞–Ј–Њ–љ–µ –Є–Ј–Љ–µ—А–µ–љ–Є–є, –Ї–Њ—В–Њ—А—Л–µ –Њ—В–Њ–±—А–∞–ґ–∞—О—В—Б—П —Б –њ–Њ–Љ–Њ—Й—М—О —Г–≥–ї–∞ –Ї—А—Г—З–µ–љ–Є—П —В–Њ—А—Б–Є–Њ–љ–∞ –≤ –≤–Є–і–µ —Б–Є–≥–љ–∞–ї–Њ–≤ —Б–Є–љ—Г—Б–∞ –Є –Ї–Њ—Б–Є–љ—Г—Б–∞. –†–∞—Б—З–µ—В —Г–≥–ї–∞ –Ї—А—Г—З–µ–љ–Є—П –Є —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–µ–љ–љ–Њ –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞ –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –≤ –±–ї–Њ–Ї–µ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Б –њ–Њ–Љ–Њ—Й—М—О —Д—Г–љ–Ї—Ж–Є–Є –∞—А–Ї—В–∞–љ–≥–µ–љ—Б–∞. –Я–Њ—Б–Ї–Њ–ї—М–Ї—Г –њ–Њ—Б—А–µ–і—Б—В–≤–Њ–Љ –Њ–±–Њ–Ј–љ–∞—З–µ–љ–љ–Њ–≥–Њ –Є–Ј–Љ–µ—А–Є—В–µ–ї—М–љ–Њ–≥–Њ –і–Є–∞–њ–∞–Ј–Њ–љ–∞ –≤—Б–µ–≥–і–∞ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В—Б—П —Б—В—А–Њ–≥–Њ–µ —Б–Њ–≥–ї–∞—Б–Њ–≤–∞–љ–Є–µ –Њ–±–Њ–Є—Е —Б–Є–≥–љ–∞–ї–Њ–≤, –њ—А–Є –љ–∞–ї–Є—З–Є–Є –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–є –Њ—В —Н—В–Њ–≥–Њ —Б–Њ–≥–ї–∞—Б–Њ–≤–∞–љ–Є—П —А–∞—Б–њ–Њ–Ј–љ–∞—О—В—Б—П –љ–µ–њ–Њ–ї–∞–і–Ї–Є –≤ —А–∞–±–Њ—В–µ –і–∞—В—З–Є–Ї–∞ –Є –њ—А–Є–љ–Є–Љ–∞—О—В—Б—П –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–µ –Љ–µ—А—Л –њ–Њ –µ–≥–Њ –Ј–∞–Љ–µ–љ–µ. –Ф–ї—П –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Њ–≥–Њ –Ї–Њ–љ—В–∞–Ї—В–∞ –і–∞—В—З–Є–Ї–∞ —З–µ—А–µ–Ј –і–Є–∞–њ–∞–Ј–Њ–љ –Ї—А—Г—З–µ–љ–Є—П –≤ —А–∞–Ј–Љ–µ—А–µ ¬± 2 –Њ–±–Њ—А–Њ—В–∞ —А—Г–ї–µ–≤–Њ–≥–Њ –Ї–Њ–ї–µ—Б–∞ –Є—Б–њ–Њ–ї—М–Ј—Г—О—В—Б—П —Г–≥–ї–Њ–≤—Л–µ –њ—А—Г–ґ–Є–љ—Л —Б –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–Љ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ–Љ –Ї–Њ–љ—В–∞–Ї—В–Њ–≤. –° –њ–Њ–Љ–Њ—Й—М—О —Г–≥–ї–Њ–≤—Л—Е –њ—А—Г–ґ–Є–љ –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –њ–Њ–і–∞—З–∞ –љ–∞–њ—А—П–ґ–µ–љ–Є—П –њ–Є—В–∞–љ–Є—П –Є –њ–µ—А–µ–і–∞—З–∞ –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –Є–Ј–Љ–µ—А–µ–љ–Є–є.
–°–Є—Б—В–µ–Љ–∞ –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є (ESP)
–°–Є—Б—В–µ–Љ–∞ –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є (ESP)
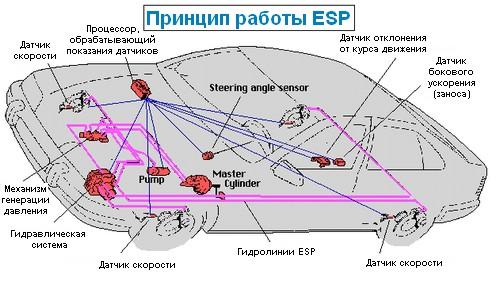
–°–Є—Б—В–µ–Љ—Г –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є —В—А–µ–±—Г–µ—В—Б—П —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞—В—М –Ї–∞–Ї –±–Њ–ї–µ–µ —А–∞—Б—И–Є—А–µ–љ–љ—Л–є –≤–∞—А–Є–∞–љ—В –∞–љ—В–Є–±–ї–Њ–Ї–Є—А–Њ–≤–Њ—З–љ–Њ–є —Б–Є—Б—В–µ–Љ—Л —В–Њ—А–Љ–Њ–Ј–Њ–≤ (–Р–С–°).
–С–Њ–ї—М—И–Є–љ—Б—В–≤–Њ —Г–Ј–ї–Њ–≤ –Њ–±—К–µ–і–Є–љ–µ–љ—Л —Б –∞–љ—В–Є–±–ї–Њ–Ї–Є—А–Њ–≤–Њ—З–љ–Њ–є —Б–Є—Б—В–µ–Љ–Њ–є –Є –≤–і–Њ–±–∞–≤–Њ–Ї –Ї –µ—С –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В–∞–Љ, —Б–Є—Б—В–µ–Љ–∞ –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є —В—А–µ–±—Г–µ—В –љ–∞–ї–Є—З–Є—П —В–∞–Ї–Є—Е –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В–Њ–≤, –Ї–∞–Ї –і–∞—В—З–Є–Ї –њ–Њ–ї–Њ–ґ–µ–љ–Є—П —А—Г–ї—П –Є –∞–Ї—Б–µ–ї–µ—А–Њ–Љ–µ—В—А, –Ї–Њ—В–Њ—А—Л–є –≤ —А–µ–∞–ї—М–љ–Њ–Љ –≤—А–µ–Љ–µ–љ–Є –Ї–Њ–љ—В—А–Њ–ї–Є—А—Г—О—В –њ–Њ–≤–Њ—А–Њ—В—Л –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П.
–Я—А–Є –љ–µ—Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Є–Є –њ–Њ–Ї–∞–Ј–∞–љ–Є–є –∞–Ї—Б–µ–ї–µ—А–Њ–Љ–µ—В—А–∞ –њ–Њ–Ї–∞–Ј–∞–љ–Є—П–Љ –і–∞—В—З–Є–Ї–∞ –њ–Њ–≤–Њ—А–Њ—В–∞ —А—Г–ї—П, —Б–Є—Б—В–µ–Љ–∞ –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є –њ—А–Є–Љ–µ–љ—П–µ—В —В–Њ—А–Љ–Њ–ґ–µ–љ–Є–µ –Њ–і–љ–Њ–≥–Њ –Є–ї–Є –љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е (–≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В —Б–Є—В—Г–∞—Ж–Є–Є) –Ї–Њ–ї—С—Б –Љ–∞—И–Є–љ—Л –і–ї—П –њ—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є—П –љ–∞—З–Є–љ–∞—О—Й–µ–≥–Њ—Б—П –Ј–∞–љ–Њ—Б–∞.
–°—А–∞–±–∞—В—Л–≤–∞–љ–Є–µ ESP –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –≤ –Њ–њ–∞—Б–љ—Л—Е —Б–Є—В—Г–∞—Ж–Є—П—Е, –Ї–Њ–≥–і–∞ –≤–Њ–Ј–Љ–Њ–ґ–љ–∞ –Є–ї–Є —Г–ґ–µ –њ—А–Њ–Є–Ј–Њ—И–ї–∞ –њ–Њ—В–µ—А—П —Г–њ—А–∞–≤–ї—П–µ–Љ–Њ—Б—В–Є –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–Љ. –°—А–∞–±–∞—В—Л–≤–∞–љ–Є–µ –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –њ—Г—В–µ–Љ –њ—А–Є—В–Њ—А–Љ–∞–ґ–Є–≤–∞–љ–Є—П –Њ—В–і–µ–ї—М–љ—Л—Е –Ї–Њ–ї–µ—Б, —З–µ–Љ —Б–Є—Б—В–µ–Љ–∞ —Б—В–∞–±–Є–ї–Є–Ј–Є—А—Г–µ—В –і–≤–Є–ґ–µ–љ–Є–µ. –Ю–љ–∞ –љ–∞—З–Є–љ–∞–µ—В —А–∞–±–Њ—В—М, –Ї–Њ–≥–і–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М –љ–∞ –±–Њ–ї—М—И–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –њ—А–Є –њ—А–Њ—Е–Њ–ґ–і–µ–љ–Є–Є –њ–Њ–≤–Њ—А–Њ—В–∞ –њ–µ—А–µ–і–љ–Є–Љ–Є –Ї–Њ–ї–µ—Б–∞–Љ–Є —Б—Е–Њ–і–Є—В —Б –Ј–∞–і–∞–љ–љ–Њ–є —В—А–∞–µ–Ї—В–Њ—А–Є–Є –≤ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–Є –і–µ–є—Б—В–≤–Є—П —Б–Є–ї –Є–љ–µ—А—Ж–Є–Є, —В–Њ –µ—Б—В—М –њ–Њ —А–∞–і–Є—Г—Б—Г –±–Њ–ї—М—И–µ–Љ—Г, —З–µ–Љ —А–∞–і–Є—Г—Б –њ–Њ–≤–Њ—А–Њ—В–∞. ESP –≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –љ–∞—З–Є–љ–∞–µ—В —А–∞–±–Њ—В–∞—В—М –њ—А–Є—В–Њ—А–Љ–∞–ґ–Є–≤–∞—П –Ј–∞–і–љ–Є–Љ –Ї–Њ–ї–µ—Б–Њ–Љ, –Є–і—Г—Й–Є–Љ –њ–Њ –≤–љ—Г—В—А–µ–љ–љ–µ–Љ—Г —А–∞–і–Є—Г—Б—Г –њ–Њ–≤–Њ—А–Њ—В–∞, –њ—А–Є–і–∞–≤–∞—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї—О –±–Њ–ї—М—И—Г—О –њ–Њ–≤–Њ—А–∞—З–Є–≤–∞–µ–Љ–Њ—Б—В—М –Є –љ–∞–њ—А–∞–≤–ї—П—П –µ–≥–Њ –≤ –њ–Њ–≤–Њ—А–Њ—В.
–Ю–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ —Б –њ—А–Є—В–Њ—А–Љ–∞–ґ–Є–≤–∞–љ–Є–µ–Љ –Ї–Њ–ї–µ—Б ESP —Б–љ–Є–ґ–∞–µ—В –Њ–±–Њ—А–Њ—В—Л –і–≤–Є–≥–∞—В–µ–ї—П. –Х—Б–ї–Є –≤–Њ –≤—А–µ–Љ—П –µ–Ј–і—Л –≤–љ–µ–Ј–∞–њ–љ–Њ –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –Ј–∞–љ–Њ—Б –Ј–∞–і–љ–µ–є —З–∞—Б—В–Є –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, ESP –љ–∞—З–Є–љ–∞–µ—В –њ—А–Є—В–Њ—А–Љ–∞–ґ–Є–≤–∞—В—М –њ–µ—А–µ–і–љ–µ–µ –Ї–Њ–ї–µ—Б–Њ, –Є–і—Г—Й–µ–µ –њ–Њ –љ–∞—А—Г–ґ–љ–Њ–Љ—Г —А–∞–і–Є—Г—Б—Г –њ–Њ–≤–Њ—А–Њ—В–∞. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –њ–Њ—П–≤–ї—П–µ—В—Б—П –Љ–Њ–Љ–µ–љ—В –њ—А–Њ—В–Є–≤–Њ–≤—А–∞—Й–µ–љ–Є—П, –Є—Б–Ї–ї—О—З–∞—О—Й–Є–є –±–Њ–Ї–Њ–≤–Њ–є –Ј–∞–љ–Њ—Б. –Ъ–Њ–≥–і–∞ —Б–Ї–Њ–ї—М–Ј—П—В –≤—Б–µ —З–µ—В—Л—А–µ –Ї–Њ–ї–µ—Б–∞, ESP –Ј–∞–њ—А–Њ–≥—А–∞–Љ–Є—А–Њ–≤–∞–љ–∞ —В–∞–Ї —З—В–Њ —В–Њ—А–Љ–Њ–Ј–љ—Л–µ –Љ–µ—Е–∞–љ–Є–Ј–Љ—Л —Б–∞–Љ–Є —А–µ—И–∞—О—В –Ї–∞–Ї–Є–µ –Ї–Њ–ї–µ—Б–∞ —В—А–µ–±—Г–µ—В—Б—П –њ—А–Є—В–Њ—А–Љ–Њ–Ј–Є—В—М –≤–Њ –≤—А–µ–Љ—П –і–≤–Є–ґ–µ–љ–Є—П.
–Т—А–µ–Љ—П —А–µ–∞–Ї—Ж–Є–Є ESP —Б–Њ—Б—В–∞–≤–ї—П–µ—В 20 –Љ–Є–ї–ї–Є—Б–µ–Ї—Г–љ–і. –°–Є—Б—В–µ–Љ–∞ —Д—Г–љ–Ї—Ж–Є–Њ–љ–Є—А—Г–µ—В –љ–∞ –ї—О–±—Л—Е —Б–Ї–Њ—А–Њ—Б—В—П—Е –Є –≤ –ї—О–±—Л—Е —А–µ–ґ–Є–Љ–∞—Е –і–≤–Є–ґ–µ–љ–Є—П. –°–Є—Б—В–µ–Љ–∞ –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є (ESP) –њ–Њ–Ї–∞ —П–≤–ї—П–µ—В—Б—П –љ–∞–Є–±–Њ–ї–µ–µ —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ–є —Б–Є—Б—В–µ–Љ–Њ–є –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є. –Ю–љ–∞ —Б–њ–Њ—Б–Њ–±–љ–∞ –Є—Б–њ—А–∞–≤–ї—П—В—М –Њ—И–Є–±–Ї–Є –≤–Њ–і–Є—В–µ–ї—П, –Є—Б–Ї–ї—О—З–∞—П –Ј–∞–љ–Њ—Б—Л, –Ї–Њ–≥–і–∞ –Ї–Њ–љ—В—А–Њ–ї—М –љ–∞–і –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–Љ —Г–ґ–µ –њ–Њ—В–µ—А—П–љ, –Њ–і–љ–∞–Ї–Њ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є —Б–Є—Б—В–µ–Љ—Л –Њ–≥—А–∞–љ–Є—З–µ–љ—Л: –і–Њ–њ—Г—Б—В–Є–Љ –µ—Б–ї–Є —А–∞–і–Є—Г—Б –њ–Њ–≤–Њ—А–Њ—В–∞ —Б–ї–Є—И–Ї–Њ–Љ –Љ–∞–ї –Є–ї–Є —Б–Ї–Њ—А–Њ—Б—В—М –≤ –њ–Њ–≤–Њ—А–Њ—В–µ –њ—А–µ–≤—Л—И–∞–µ—В –і–Њ–њ—Г—Б—В–Є–Љ—Л–µ –≥—А–∞–љ–Є—Ж—Л, –љ–Є–Ї–∞–Ї–∞—П –њ—А–Њ–≥—А–∞–Љ–Љ–∞ —Б—В–∞–±–Є–ї–Є–Ј–∞—Ж–Є–Є –љ–µ –њ–Њ–Љ–Њ–ґ–µ—В.
–Ф—А—Г–≥–Є–µ –љ–∞–Ј–≤–∞–љ–Є—П —Б–Є—Б—В–µ–Љ—Л ASC (Active Stability Control) –Є ASTC (Active Skid and Traction Control MULTIMODE), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Mitsubishi,BMW AdvanceTrac, –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Lincoln, Mercury. CST (Controllo Stabilita), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Ferrari. DSC (Dynamic Stability Control), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: BMW, Ford (—В–Њ–ї—М–Ї–Њ –≤ –Р–≤—Б—В—А–∞–ї–Є–Є), Jaguar, Land Rover, Mazda, MINI. DSTC (Dynamic Stability and Traction Control), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Volvo. ESC (Electronic Stability Control), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Chevrolet, Hyundai, Kia, SKODA, LADA ESP (Elektronisches Stabilitatsprogramm), Chery, Chrysler, Citroen, Dodge, Daimler, Fiat, Holden, Hyundai, Jeep, Kia, Mercedes Benz, Opel, Peugeot, Proton, Nissan, Renault, Saab, Scania, Smart, Suzuki, Vauxhall, Jaguar, Land Rover ESP (Elektronic Stability Program) –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Audi, Bentley, Bugatti, Lamborghini, SEAT, SKODA, Volkswagen. IVD (Interactive Vehicle Dynamics), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Ford. MSP (Maserati Stability Program), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Maserati. PCS (Precision Control System), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Oldsmobile (–њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–Њ –Ї–Њ—В–Њ—А—Л—Е –њ—А–µ–Ї—А–∞—Й–µ–љ–Њ –≤ 2004 –≥–Њ–і—Г). PSM (Porsche Stability Management), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Porsche. RSC (AdvanceTrac with Roll Stability Control), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Ford. StabiliTrak, –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Buick, Cadillac, Chevrolet (–љ–∞ Corvette –љ–∞–Ј—Л–≤–∞–µ—В—Б—П Active Handling), GMC Truck, Hummer, Pontiac, Saab, Saturn. VDC (Vehicle Dynamic Control), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Alfa Romeo, Fiat, Infiniti, Nissan, Subaru. VDIM (Vehicle Dynamics Integrated Management) —Б VSC (–∞–љ–≥–ї. Vehicle Stability Control), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Toyota, Lexus. VSA (Vehicle Stability Assist), –Є—Б–њ–Њ–ї—М–Ј—Г–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е: Acura, Honda, Hyundai.
–Ф–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ —Д—Г–љ–Ї—Ж–Є–Є —Б–Є—Б—В–µ–Љ—Л –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є
–Т –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є–Є —Б–Є—Б—В–µ–Љ—Л –Ї—Г—А—Б–Њ–≤–Њ–є —Г—Б—В–Њ–є—З–Є–≤–Њ—Б—В–Є –Љ–Њ–≥—Г—В –±—Л—В—М —А–µ–∞–ї–Є–Ј–Њ–≤–∞–љ—Л —Б–ї–µ–і—Г—О—Й–Є–µ –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ —Д—Г–љ–Ї—Ж–Є–Є (–њ–Њ–і—Б–Є—Б—В–µ–Љ—Л): –≥–Є–і—А–∞–≤–ї–Є—З–µ—Б–Ї–Є–є —Г—Б–Є–ї–Є—В–µ–ї—М —В–Њ—А–Љ–Њ–Ј–Њ–≤, –њ—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є—П –Њ–њ—А–Њ–Ї–Є–і—Л–≤–∞–љ–Є—П, –њ—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П, —Б—В–∞–±–Є–ї–Є–Ј–∞—Ж–Є–Є –∞–≤—В–Њ–њ–Њ–µ–Ј–і–∞, –њ–Њ–≤—Л—И–µ–љ–Є—П —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В–Є —В–Њ—А–Љ–Њ–Ј–Њ–≤ –њ—А–Є –љ–∞–≥—А–µ–≤–µ, —Г–і–∞–ї–µ–љ–Є—П –≤–ї–∞–≥–Є —Б —В–Њ—А–Љ–Њ–Ј–љ—Л—Е –і–Є—Б–Ї–Њ–≤ –Є –Є –і—А.
–Т—Б–µ –њ–µ—А–µ—З–Є—Б–ї–µ–љ–љ—Л–µ —Б–Є—Б—В–µ–Љ—Л, –≤ –Њ—Б–љ–Њ–≤–љ–Њ–Љ, –љ–µ –Є–Љ–µ—О—В —Б–≤–Њ–Є—Е –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є—Е —Н–ї–µ–Љ–µ–љ—В–Њ–≤, –∞ —П–≤–ї—П—О—В—Б—П –Ј–∞–њ—А–Њ–≥—А–∞–Љ–Љ–Є—А–Њ–≤–∞–љ—Л–Љ–Є –≤ —Б–Є—Б—В–µ–Љ–µ ESP. ROP (Roll Over Prevention) вАФ –°–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є—П –Њ–њ—А–Њ–Ї–Є–і—Л–≤–∞–љ–Є—П —Б—В–∞–±–Є–ї–Є–Ј–Є—А—Г–µ—В –і–≤–Є–ґ–µ–љ–Є–µ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П –њ—А–Є —Г–≥—А–Њ–Ј–µ –Њ–њ—А–Њ–Ї–Є–і—Л–≤–∞–љ–Є—П.
–Я—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є–µ –Њ–њ—А–Њ–Ї–Є–і—Л–≤–∞–љ–Є—П –і–Њ—Б—В–Є–≥–∞–µ—В—Б—П –Ј–∞ —Б—З–µ—В —Г–Љ–µ–љ—М—И–µ–љ–Є—П –њ–Њ–њ–µ—А–µ—З–љ–Њ–≥–Њ —Г—Б–Ї–Њ—А–µ–љ–Є—П –њ—Г—В–µ–Љ –њ–Њ–і—В–Њ—А–Љ–∞–ґ–Є–≤–∞–љ–Є—П –њ–µ—А–µ–і–љ–Є—Е –Ї–Њ–ї–µ—Б –Є —Б–љ–Є–ґ–µ–љ–Є—П –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞ –і–≤–Є–≥–∞—В–µ–ї—П. –Ф–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–µ –і–∞–≤–ї–µ–љ–Є–µ –≤ —В–Њ—А–Љ–Њ–Ј–љ–Њ–є —Б–Є—Б—В–µ–Љ–µ —Б–Њ–Ј–і–∞–µ—В—Б—П —Б –њ–Њ–Љ–Њ—Й—М—О –∞–Ї—В–Є–≤–љ–Њ–≥–Њ —Г—Б–Є–ї–Є—В–µ–ї—П —В–Њ—А–Љ–Њ–Ј–Њ–≤. (Braking Guard) вАФ –°–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П–Љ–Њ–ґ–µ—В –±—Л—В—М —А–µ–∞–ї–Є–Ј–Њ–≤–∞–љ–∞ –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ, –Њ—Б–љ–∞—Й–µ–љ–љ–Њ–Љ –∞–і–∞–њ—В–Є–≤–љ—Л–Љ –Ї—А—Г–Є–Ј-–Ї–Њ–љ—В—А–Њ–ї–µ–Љ. –°–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–Њ—В–≤—А–∞—Й–∞–µ—В –Њ–њ–∞—Б–љ–Њ—Б—В—М —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П —Б –њ–Њ–Љ–Њ—Й—М—О –≤–Є–Ј—Г–∞–ї—М–љ—Л—Е –Є –Ј–≤—Г–Ї–Њ–≤—Л—Е —Б–Є–≥–љ–∞–ї–Њ–≤, –∞ –≤ –Ї—А–Є—В–Є—З–µ—Б–Ї–Њ–є —Б–Є—В—Г–∞—Ж–Є–Є вАФ –њ—Г—В–µ–Љ –љ–∞–≥–љ–µ—В–∞–љ–Є—П –і–∞–≤–ї–µ–љ–Є—П –≤ —В–Њ—А–Љ–Њ–Ј–љ–Њ–є —Б–Є—Б—В–µ–Љ–µ (–∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–≥–Њ –≤–Ї–ї—О—З–µ–љ–Є—П –љ–∞—Б–Њ—Б–∞ –Њ–±—А–∞—В–љ–Њ–є –њ–Њ–і–∞—З–Є).
–°–Є—Б—В–µ–Љ–∞ —Б—В–∞–±–Є–ї–Є–Ј–∞—Ж–Є–Є –∞–≤—В–Њ–њ–Њ–µ–Ј–і–∞ –Љ–Њ–ґ–µ—В –±—Л—В—М —А–µ–∞–ї–Є–Ј–Њ–≤–∞–љ–∞ –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ, –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–љ—Л–Љ —В—П–≥–Њ–≤–Њ-—Б—Ж–µ–њ–љ—Л–Љ —Г—Б—В—А–Њ–є—Б—В–≤–Њ–Љ. –°–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–Њ—В–≤—А–∞—Й–∞–µ—В —А—Л—Б–Ї–∞–љ–Є–µ –њ—А–Є—Ж–µ–њ–∞ –њ—А–Є –і–≤–Є–ґ–µ–љ–Є–Є –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, –Ї–Њ—В–Њ—А–Њ–µ –і–Њ—Б—В–Є–≥–∞–µ—В—Б—П –Ј–∞ —Б—З–µ—В —В–Њ—А–Љ–Њ–ґ–µ–љ–Є—П –Ї–Њ–ї–µ—Б –Є–ї–Є —Б–љ–Є–ґ–µ–љ–Є—П –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞. FBS (Fading Brake Support, –і—А—Г–≥–Њ–µ –љ–∞–Є–Љ–µ–љ–Њ–≤–∞–љ–Є–µ вАФ Over Boost) вАФ –°–Є—Б—В–µ–Љ–∞ –њ–Њ–≤—Л—И–µ–љ–Є—П —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В–Є —В–Њ—А–Љ–Њ–Ј–Њ–≤ –њ—А–Є –љ–∞–≥—А–µ–≤–µ –њ—А–µ–і–Њ—В–≤—А–∞—Й–∞–µ—В –љ–µ–і–Њ—Б—В–∞—В–Њ—З–љ–Њ–µ —Б—Ж–µ–њ–ї–µ–љ–Є–µ —В–Њ—А–Љ–Њ–Ј–љ—Л—Е –Ї–Њ–ї–Њ–і–Њ–Ї —Б —В–Њ—А–Љ–Њ–Ј–љ—Л–Љ–Є –і–Є—Б–Ї–∞–Љ–Є, –≤–Њ–Ј–љ–Є–Ї–∞—О—Й–µ–µ –њ—А–Є –љ–∞–≥—А–µ–≤–µ, –њ—Г—В–µ–Љ –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–≥–Њ —Г–≤–µ–ї–Є—З–µ–љ–Є—П –і–∞–≤–ї–µ–љ–Є—П –≤ —В–Њ—А–Љ–Њ–Ј–љ–Њ–Љ –њ—А–Є–≤–Њ–і–µ.
–°–Є—Б—В–µ–Љ–∞ —Г–і–∞–ї–µ–љ–Є—П –≤–ї–∞–≥–Є —Б —В–Њ—А–Љ–Њ–Ј–љ—Л—Е –і–Є—Б–Ї–Њ–≤ –∞–Ї—В–Є–≤–Є—А—Г–µ—В—Б—П –љ–∞ —Б–Ї–Њ—А–Њ—Б—В–Є —Б–≤—Л—И–µ 50–Ї–Љ/—З –Є –≤–Ї–ї—О—З–µ–љ–љ—Л—Е —Б—В–µ–Ї–ї–Њ–Њ—З–Є—Б—В–Є—В–µ–ї—П—Е. –Я—А–Є–љ—Ж–Є–њ —А–∞–±–Њ—В—Л —Б–Є—Б—В–µ–Љ—Л –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П –≤ –Ї—А–∞—В–Ї–Њ–≤—А–µ–Љ–µ–љ–љ–Њ–Љ –њ–Њ–≤—Л—И–µ–љ–Є–Є –і–∞–≤–ї–µ–љ–Є—П –≤ –Ї–Њ–љ—В—Г—А–µ –њ–µ—А–µ–і–љ–Є—Е –Ї–Њ–ї–µ—Б, –Ј–∞ —Б—З–µ—В —З–µ–≥–Њ —В–Њ—А–Љ–Њ–Ј–љ—Л–µ –Ї–Њ–ї–Њ–і–Ї–Є –њ—А–Є–ґ–Є–Љ–∞—О—В—Б—П –Ї –і–Є—Б–Ї–∞–Љ –Є –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –Є—Б–њ–∞—А–µ–љ–Є–µ –≤–ї–∞–≥–Є.
Digifant — —Б–Є—Б—В–µ–Љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї–µ–Љ
Digifant — —Б–Є—Б—В–µ–Љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї–µ–Љ
–†–µ–Љ–Њ–љ—В –∞–≤—В–Њ—Н–ї–µ–Ї—В—А–Є–Ї–Є –≤ –Ь–Є–љ—Б–Ї–µ
–Ъ–Њ–Љ–њ–ї–µ–Ї—Б–љ–∞—П —Б–Є—Б—В–µ–Љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї–µ–Љ Digifant –Ї–Њ–Љ–њ–∞–љ–Є–Є Volkswagen, —Б–Њ—Б—В–Њ–Є—В –Є–Ј –і–≤—Г—Е –њ–Њ–і—Б–Є—Б—В–µ–Љ: —Г–њ—А–∞–≤–ї–µ–љ–Є—П –≤–њ—А—Л—Б–Ї–Њ–Љ —В–Њ–њ–ї–Є–≤–∞ –Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Г–≥–ї–Њ–Љ –Њ–њ–µ—А–µ–ґ–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П. –†–∞–±–Њ—В–∞ –≤—Б–µ—Е –њ–Њ–і—Б–Є—Б—В–µ–Љ —Г–њ—А–∞–≤–ї—П–µ—В—Б—П —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–Љ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–Љ, –Ї–Њ—В–Њ—А—Л–є —П–≤–ї—П–µ—В—Б—П —Б–њ–µ—Ж–Є–∞–ї–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л–Љ –Љ–Є–Ї—А–Њ–Ї–Њ–Љ–њ—М—О—В–µ—А–Њ–Љ.
–Я–Њ–і—Б–Є—Б—В–µ–Љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –≤–њ—А—Л—Б–Ї–Њ–Љ —В–Њ–њ–ї–Є–≤–∞
–Я–Њ–і—Б–Є—Б—В–µ–Љ–∞ –Њ—В–≤–µ—З–∞–µ—В –Ј–∞ –њ–Њ–і–≥–Њ—В–Њ–≤–Ї—Г —В–Њ–њ–ї–Є–≤–љ–Њ–є —Б–Љ–µ—Б–Є –Є –µ–µ –њ–Њ–і–∞—З—Г –≤ –і–≤–Є–≥–∞—В–µ–ї—М. –Я—А–Є —Н—В–Њ–Љ, –Ї –Ї–∞–ґ–і–Њ–Љ—Г —Ж–Є–ї–Є–љ–і—А—Г, —В–Њ–њ–ї–Є–≤–љ–∞—П —Б–Љ–µ—Б—М –њ–Њ–і–∞–µ—В—Б—П –Њ—В–і–µ–ї—М–љ–Њ–є —Д–Њ—А—Б—Г–љ–Ї–Њ–є. –†–∞–±–Њ—В–∞–µ—В –њ–Њ–і—Б–Є—Б—В–µ–Љ–∞ —Б–ї–µ–і—Г—О—Й–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ.
–Ґ–Њ–њ–ї–Є–≤–љ—Л–є —Н–ї–µ–Ї—В—А–Њ–љ–∞—Б–Њ—Б –њ–Њ–і –і–∞–≤–ї–µ–љ–Є–µ–Љ 2,5 –Ї–≥/—Б–Љ’, –њ–Њ–і–∞–µ—В —В–Њ–њ–ї–Є–≤–Њ –Є–Ј –±–µ–љ–Ј–Њ–±–∞–Ї–∞ —З–µ—А–µ–Ј —В–Њ–њ–ї–Є–≤–љ—Л–є —Д–Є–ї—М—В—А –Ї —В–Њ–њ–ї–Є–≤–љ–Њ–Љ—Г —В—А–∞–Ї—В—Г –Є –і–∞–ї–µ–µ –Ї —Д–Њ—А—Б—Г–љ–Ї–∞–Љ. –Т –Ї–Њ–љ—Ж–µ —В–Њ–њ–ї–Є–≤–љ–Њ–≥–Њ —В—А–∞–Ї—В–∞ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ —А–µ–≥—Г–ї—П—В–Њ—А –і–∞–≤–ї–µ–љ–Є—П —В–Њ–њ–ї–Є–≤–∞ –≤ —Б–Є—Б—В–µ–Љ–µ, –Ї–Њ—В–Њ—А—Л–є –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В –њ–Њ—Б—В–Њ—П–љ–љ–Њ–µ –і–∞–≤–ї–µ–љ–Є–µ –≤–њ—А—Л—Б–Ї–∞ –Є –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В —Б–ї–Є–≤ –Є–Ј–ї–Є—И–Ї–Њ–≤ —В–Њ–њ–ї–Є–≤–∞ –Њ–±—А–∞—В–љ–Њ –≤ —В–Њ–њ–ї–Є–≤–љ—Л–є –±–∞–Ї, —В–µ–Љ —Б–∞–Љ—Л–Љ, –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—П —Ж–Є—А–Ї—Г–ї—П—Ж–Є—О —В–Њ–њ–ї–Є–≤–∞ –≤ —Б–Є—Б—В–µ–Љ–µ –Є –Є—Б–Ї–ї—О—З–∞–µ—В –Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є–µ –≤ –љ–µ–є –њ–∞—А–Њ–≤ —В–Њ–њ–ї–Є–≤–∞.
–Т –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є –њ–Њ–ї—Г—З–µ–љ–љ–Њ–є –Њ—В –і–∞—В—З–Є–Ї–Њ–≤ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Л—Е –љ–∞ –і–≤–Є–≥–∞—В–µ–ї–µ, —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А —Г–њ—А–∞–≤–ї—П–µ—В —Д–Њ—А—Б—Г–љ–Ї–∞–Љ–Є, —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —А–µ–≥—Г–ї–Є—А—Г—П –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ —В–Њ–њ–ї–Є–≤–љ–Њ–є —Б–Љ–µ—Б–Є –њ–Њ–і–∞–≤–∞–µ–Љ–Њ–є –≤ —Ж–Є–ї–Є–љ–і—А—Л. –Я—А–Є —Н—В–Њ–Љ, —Г—З–Є—В—Л–≤–∞–µ—В—Б—П –Њ–±—К–µ–Љ –Є —В–µ–Љ–њ–µ—А–∞—В—Г—А–∞ –≤—Б–∞—Б—Л–≤–∞–µ–Љ–Њ–≥–Њ –≤–Њ–Ј–і—Г—Е–∞, —З–∞—Б—В–Њ—В–∞ –≤—А–∞—Й–µ–љ–Є—П –Є —Г–≥–Њ–ї –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –Ї–Њ–ї–µ–љ-–≤–∞–ї–∞, –љ–∞–≥—А—Г–Ј–Ї–∞ –і–≤–Є–≥–∞—В–µ–ї—П –Є —В–µ–Љ–њ–µ—А–∞—В—Г—А–∞ –µ–≥–Њ –Њ—Е–ї–∞–ґ–і–∞—О—Й–µ–є –ґ–Є–і–Ї–Њ—Б—В–Є. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –њ—А–Є —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–Љ –ї—П–Љ–±–і–∞-–Ј–Њ–љ–і–µ, —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А —Г—З–Є—В—Л–≤–∞–µ—В –Є –µ–≥–Њ –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О, —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –Њ–њ—В–Є–Љ–∞–ї—М–љ–Њ –њ–Њ–і–і–µ—А–ґ–Є–≤–∞—П —Б–Њ–і–µ—А–ґ–∞–љ–Є–µ –≤—А–µ–і–љ—Л—Е –њ—А–Є–Љ–µ—Б–µ–є –≤ –≤—Л—Е–ї–Њ–њ–љ—Л—Е –≥–∞–Ј–∞—Е. –Ю—Б–љ–Њ–≤–љ—Л–Љ –њ–∞—А–∞–Љ–µ—В—А–Њ–Љ, –Њ–њ—А–µ–і–µ–ї—П—О—Й–Є–Љ –і–Њ–Ј–Є—А–Њ–≤–Ї—Г —В–Њ–њ–ї–Є–≤–∞, —П–≤–ї—П–µ—В—Б—П –Њ–±—К–µ–Љ –≤—Б–∞—Б—Л–≤–∞–µ–Љ–Њ–≥–Њ –≤–Њ–Ј–і—Г—Е–∞. –Я–Њ—Б—В—Г–њ–∞—О—Й–Є–є —З–µ—А–µ–Ј —Д–Є–ї—М—В—А –≤–Њ–Ј–і—Г—И–љ—Л–є –њ–Њ—В–Њ–Ї –Њ—В–Ї–ї–Њ–љ—П–µ—В –љ–∞ –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л–є —Г–≥–Њ–ї –љ–∞–њ–Њ—А–љ—Г—О –Ј–∞—Б–ї–Њ–љ–Ї—Г, –Ї–Њ—В–Њ—А–∞—П —Б–≤—П–Ј–∞–љ–∞ —Б –њ–Њ—В–µ–љ—Ж–Є–Њ–Љ–µ—В-—А–Є—З–µ—Б–Ї–Є–Љ –і–∞—В—З–Є–Ї–Њ–Љ —Г–≥–ї–∞ –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П —Н—В–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є. –°–Є–≥–љ–∞–ї —Б –і–∞—В—З–Є–Ї–∞ –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –≤–Њ–Ј–і—Г—И–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є –њ–Њ—Б—В—Г–њ–∞–µ—В –≤ —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А, –∞ –Њ–љ –Њ–њ—А–µ–і–µ–ї—П–µ—В –Ї–∞–Ї–Њ–µ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ —В–Њ–њ–ї–Є–≤–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –≤ –і–∞–љ–љ—Л–є –Љ–Њ–Љ–µ–љ—В –Є –≤—Л–і–∞–µ—В —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й–Є–µ —Б–Є–≥–љ–∞–ї—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ—В–Ї—А—Л—В–Є—П —Д–Њ—А—Б—Г–љ–Њ–Ї –љ–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ–µ –≤—А–µ–Љ—П.
–Э–µ–Ј–∞–≤–Є—Б–Є–Љ–Њ –Њ—В –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –≤–њ—Г—Б–Ї–љ—Л—Е –Ї–ї–∞–њ–∞–љ–Њ–≤ –≤–њ—А—Л—Б–Ї —В–Њ–њ–ї–Є–≤–∞ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –і–≤–∞–ґ–і—Л –љ–∞ –Ї–∞–ґ–і—Л–є –Њ–±–Њ—А–Њ—В –Ї–Њ–ї–µ–љ–≤–∞–ї–∞. –Х—Б–ї–Є –≤–њ—Г—Б–Ї–љ–Њ–є –Ї–ї–∞–њ–∞–љ –Ј–∞–Ї—А—Л—В, —В–Њ–њ–ї–Є–≤–Њ –Њ—Б—В–∞–µ—В—Б—П –≤–Њ –≤–њ—Г—Б–Ї–љ–Њ–Љ –Ї–Њ–ї–ї–µ–Ї—В–Њ—А–µ –і–Њ —Б–ї–µ–і—Г—О—Й–µ–≥–Њ –Њ—В–Ї—А—Л—В–Є—П –≤–њ—Г—Б–Ї–љ–Њ–≥–Њ –Ї–ї–∞–њ–∞–љ–∞ –і–∞–љ–љ–Њ–≥–Њ —Ж–Є–ї–Є–љ–і—А–∞.
–Ю–±–Њ–≥–∞—Й–µ–љ–Є–µ —В–Њ–њ–ї–Є–≤–љ–Њ–є —Б–Љ–µ—Б–Є –≤ –њ—Г—Б–Ї–Њ–≤—Л—Е —А–µ–ґ–Є–Љ–∞—Е –Љ–Њ–ґ–µ—В –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –њ–Њ—Б—А–µ–і—Б—В–≤–Њ–Љ –њ–Њ–і–∞—З–Є –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–≥–Њ —В–Њ–њ–ї–Є–≤–∞ –Њ—Б–љ–Њ–≤–љ—Л–Љ–Є —Д–Њ—А—Б—Г–љ–Ї–∞–Љ–Є, –Ї–∞–Ї –љ–∞–њ—А–Є–Љ–µ—А –≤ –і–≤–Є–≥–∞—В–µ–ї—П—Е ¬Ђ–†–Т¬ї –Є–ї–Є –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–Љ–Є —Д–Њ—А—Б—Г–љ–Ї–∞–Љ–Є —Г–њ—А–∞–≤–ї—П–µ–Љ—Л–Љ–Є —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–Љ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–Љ, –Ї–∞–Ї –≤ –і–≤–Є–≥–∞—В–µ–ї–µ «2–Х¬ї.
–Я—А–Є –њ—А–µ–≤—Л—И–µ–љ–Є–Є –Ј–∞–і–∞–љ–љ–Њ–є —З–∞—Б—В–Њ—В—Л –≤—А–∞—Й–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї—П –Є –љ–∞ –њ—А–Є–љ—Г–і–Є—В–µ–ї—М–љ–Њ–Љ —Е–Њ–ї–Њ—Б—В–Њ–Љ —Е–Њ–і—Г —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А –њ—А–µ–Ї—А–∞—Й–∞–µ—В —Г–њ—А–∞–≤–ї–µ–љ–Є–µ —Д–Њ—А—Б—Г–љ–Ї–∞–Љ–Є, —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –њ—А–µ–Ї—А–∞—Й–∞—П –њ–Њ–і–∞—З—Г —В–Њ–њ–ї–Є–≤–∞ –≤ —Ж–Є–ї–Є–љ–і—А—Л –і–≤–Є–≥–∞—В–µ–ї—П.
–Ф–Њ–Ј–Є—А–Њ–≤–∞–љ–Є–µ –њ–Њ–і–∞—З–Є –≤–Њ–Ј–і—Г—Е–∞ –њ—А–Є –њ—Г—Б–Ї–µ, –њ—А–Њ–≥—А–µ–≤–µ –Є –љ–∞ —Е–Њ–ї–Њ—Б—В–Њ–Љ —Е–Њ–і—Г –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –Ї–ї–∞–њ–∞–љ–Њ–Љ —Б—В–∞–±–Є–ї–Є–Ј–∞—Ж–Є–Є —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞.
–§—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л –њ–Њ–і—Б–Є—Б—В–µ–Љ—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П –≤–њ—А—Л—Б–Ї–Њ–Љ —В–Њ–њ–ї–Є–≤–∞
–Ґ–Њ–њ–ї–Є–≤–љ—Л–є –љ–∞—Б–Њ—Б
–≠–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–є –њ–Њ–≥—А—Г–ґ–љ–Њ–є —А–Њ–ї–Є–Ї–Њ–≤—Л–є —В–Њ–њ–ї–Є–≤–љ—Л–є –љ–∞—Б–Њ—Б. –£—Б—В–∞–љ–Њ–≤–ї–µ–љ 8 —В–Њ–њ–ї–Є–≤–љ–Њ–Љ –±–∞–Ї–µ –≤ –Њ–і–љ–Њ–Љ –±–ї–Њ–Ї–µ —Б –і–∞—В—З–Є–Ї–Њ–Љ —Г—А–Њ–≤–љ—П —В–Њ–њ–ї–Є–≤–∞.
–Ь–∞—А–Ї–∞ –Є –Ї–∞—В–∞–ї–Њ–ґ–љ—Л–є –љ–Њ–Љ–µ—А: BOSCH 0 580 453 012 –Ф–∞–≤–ї–µ–љ–Є–µ –њ–Њ–і–∞—З–Є —В–Њ–њ–ї–Є–≤–∞ — 3 –Ї–≥/—Б–Љ*. –Я—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В—М –њ—А–Є –љ–∞–њ—А—П–ґ–µ–љ–Є–Є –њ–Є—В–∞–љ–Є—П –љ–∞ –≤—Л–≤–Њ–і–∞—Е (–њ–Њ –≤—Б–µ–Љ –њ–∞—А–∞–Љ–µ—В—А–∞–Љ ¬±10 cmj/30 —Б–µ–Ї):
— 9–Т: 275 —Б–Љ*/30 —Б–µ–Ї.
— 10–Т: 350 —Б–Љ730 —Б–µ–Ї.
— 11–Т: 425 —Б–Љ’/–Ч–Ю —Б–µ–Ї.
— 12–Т: 500 —Б–Љ’/–Ч–Ю —Б–µ–Ї.
–†–µ–≥—Г–ї—П—В–Њ—А –і–∞–≤–ї–µ–љ–Є—П —В–Њ–њ–ї–Є–≤–∞
–†–µ–≥—Г–ї—П—В–Њ—А –і–∞–≤–ї–µ–љ–Є—П —В–Њ–њ–ї–Є–≤–∞ –і–Є–∞—Д—А–∞–≥–Љ–µ–љ–љ–Њ–≥–Њ —В–Є–њ–∞. –£—Б—В–∞–љ–Њ–≤–ї–µ–љ –љ–∞ —В–Њ–њ–ї–Є–≤–љ–Њ–Љ —В—А–∞–Ї—В–µ –Є —Б–ї—Г–ґ–Є—В –і–ї—П –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П –њ–Њ—Б—В–Њ—П–љ–љ–Њ–≥–Њ –і–∞–≤–ї–µ–љ–Є—П —В–Њ–њ–ї–Є–≤–∞ –≤ —Б–Є—Б—В–µ–Љ–µ.
–Ф–∞–≤–ї–µ–љ–Є–µ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П –љ–∞ —Е–Њ–ї–Њ—Б—В–Њ–Љ —Е–Њ–і—Г:
— –њ—А–Є –њ–Њ–і—Б–Њ–µ–і–Є–љ–µ–љ–љ–Њ–є –≤–∞–Ї—Г—Г–Љ–љ–Њ–є —В—А—Г–±–Ї–µ: 2,5 –Ї–≥/—Б–Љ»;
— –њ—А–Є –Њ—В—Б–Њ–µ–і–Є–љ–µ–љ–љ–Њ–є –≤–∞–Ї—Г—Г–Љ–љ–Њ–є —В—А—Г–±–Ї–µ: 3,0 –Ї–≥/—Б–Љ’. –Ф–∞–≤–ї–µ–љ–Є–µ —В–∞—А–Є—А–Њ–≤–Ї–Є: ¬± 0,2 –Ї–≥/—Б–Љ’.
–Ю—Б—В–∞—В–Њ—З–љ–Њ–µ –і–∞–≤–ї–µ–љ–Є–µ 8 —Б–Є—Б—В–µ–Љ–µ —З–µ—А–µ–Ј 10 –Љ–Є–љ—Г—В –њ–Њ—Б–ї–µ –≤—Л–Ї–ї—О—З–µ–љ–Є—П —В–Њ–њ–ї–Є–≤–љ–Њ–≥–Њ –љ–∞—Б–Њ—Б–∞, –љ–µ –Љ–µ–љ–µ–µ 2 –Ї–≥/—Б–Љ».
–Ш–Ј–Љ–µ—А–Є—В–µ–ї—М —А–∞—Б—Е–Њ–і–∞ –≤–Њ–Ј–і—Г—Е–∞
–Ш–Ј–Љ–µ—А–Є—В–µ–ї—М —А–∞—Б—Е–Њ–і–∞ –≤–Њ–Ј–і—Г—Е–∞ —Б –љ–∞–њ–Њ—А–љ—Л–Љ –і–Є—Б–Ї–Њ–Љ –і–ї—П –Є–Ј–Љ–µ—А–µ–љ–Є—П –Ї–Њ–ї–Є—З–µ—Б—В–≤–∞ –≤–Њ–Ј–і—Г—Е–∞ –њ–Њ—Б—В—Г–њ–∞—О—Й–µ–≥–Њ –≤ –і–≤–Є–≥–∞—В–µ–ї—М. –Я–Њ—В–µ–љ—Ж–Є–Њ–Љ–µ—В—А–Є—З–µ—Б–Ї–Є–є. –£—Б—В–∞–љ–Њ–≤–ї–µ–љ –љ–∞ –Њ—Б–Є –љ–∞–њ–Њ—А–љ–Њ–≥–Њ –і–Є—Б–Ї–∞, —Б –≤—Б—В—А–Њ–µ–љ–љ—Л–Љ –≤ –Ї–Њ—А–њ—Г—Б, –і–∞—В—З–Є–Ї–Њ–Љ —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л –≤—Б–∞—Б—Л–≤–∞–µ–Љ–Њ–≥–Њ –≤–Њ–Ј–і—Г—Е–∞ —А–µ–Ј–Є—Б—В–Є–≤–љ–Њ–≥–Њ —В–Є–њ–∞ –Є –Њ—В—А–Є—Ж–∞—В–µ–ї—М–љ—Л–Љ —В–µ–Љ–њ–µ—А–∞—В—Г—А–љ—Л–Љ –Ї–Њ—Н—Д—Д–Є—Ж–Є–µ–љ—В–Њ–Љ (–њ—А–Є –њ–Њ–≤—Л—И–µ–љ–Є–Є —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л —Г–Љ–µ–љ—М—И–∞–µ—В—Б—П —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ).
–Ь–∞—А–Ї–∞: BOSCH. –Э–Њ–Љ–µ—А–∞ –њ–Њ –Ї–∞—В–∞–ї–Њ–≥—Г: –Ј–∞–≤–Њ–і—Б–Ї–∞—П —Г—Б—В–∞–љ–Њ–≤–Ї–∞ — 0 280 200 241; –Ј–∞–њ—З–∞—Б—В—М — 0 289 200 242.
–°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –њ–Њ—В–µ–љ—Ж–Є–Њ–Љ–µ—В—А–Є—З–µ—Б–Ї–Њ–≥–Њ –і–∞—В—З–Є–Ї–∞ –њ—А–Є –Є–Ј–Љ–µ—А–µ–љ–Є–Є –Љ–µ–ґ–і—Г –≤—Л–≤–Њ–і–∞–Љ–Є —А–∞–Ј—М–µ–Љ–∞ –Є–Ј–Љ–µ—А–Є—В–µ–ї—П —А–∞—Б—Е–Њ–і–∞ –≤–Њ–Ј–і—Г—Е–∞:
— ¬Ђ3¬ї –Є ¬Ђ4->: 500-1000 –Ю–Љ;
— ¬Ђ2¬ї –Є ¬Ђ3-: –њ–ї–∞–≤–љ–Њ –Є–Ј–Љ–µ–љ—П–µ—В—Б—П –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –љ–∞–њ–Њ—А–љ–Њ–≥–Њ –і–Є—Б–Ї–∞.
–°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –і–∞—В—З–Є–Ї–∞ —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л –≤—Б–∞—Б—Л–≤–∞–µ–Љ–Њ–≥–Њ –≤–Њ–Ј–і—Г—Е–∞ –њ—А–Є –Є–Ј–Љ–µ—А–µ–љ–Є–Є –Љ–µ–ґ–і—Г –≤—Л–≤–Њ–і–∞–Љ–Є ¬Ђ1¬ї –Є «4¬ї —А–∞–Ј—М–µ–Љ–∞ –Є–Ј–Љ–µ—А–Є—В–µ–ї—П —А–∞—Б—Е–Њ–і–∞ –≤–Њ–Ј–і—Г—Е–∞ –Є –њ—А–Є —В–µ–Љ–њ–µ—А–∞—В—Г—А–µ –≤–Њ–Ј–і—Г—Е–∞:
— 0¬∞–°: 5.5 ¬± 0.7 –Ї–Ю–Љ;
— 20¬∞–°: 2.5 ¬± 0,5 –Ї–Ю–Љ; -30¬∞–°: 1.8 ¬±0,2 –Ї–Ю–Љ;
— 50¬∞–°: 0.8 ¬± 0.1 –Ї–Ю–Љ;
— 80*–°: 0,35 ¬± 0,05 –Ї–Ю–Љ; -100″C: 0,2 ¬±0,025 –Ї–Ю–Љ.
–Ф–∞—В—З–Є–Ї —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л –Њ—Е–ї–∞–ґ–і–∞—О—Й–µ–є –ґ–Є–і–Ї–Њ—Б—В–Є
–Ф–∞—В—З–Є–Ї —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л –Њ—Е–ї–∞–ґ–і–∞—О—Й–µ–є –ґ–Є–і–Ї–Њ—Б—В–Є —В–Њ–≥–Њ –ґ–µ
—В–Є–њ–∞, —З—В–Њ –Є –і–∞—В—З–Є–Ї —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л –≤—Б–∞—Б—Л–≤–∞–µ–Љ–Њ–≥–Њ –≤–Њ–Ј–і—Г—Е–∞
–Є —Б —В–µ–Љ–Є –ґ–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–∞–Љ–Є.
–Ф–∞—В—З–Є–Ї–Є –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є
–°—Г—Й–µ—Б—В–≤—Г–µ—В –і–≤–∞ –≤–∞—А–Є–∞–љ—В. –Т –њ–µ—А–≤–Њ–Љ –Є–Ј –љ–Є—Е —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ—Л –і–∞—В—З–Є–Ї —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞ –Є –і–∞—В—З–Є–Ї –њ–Њ–ї–љ–Њ–є –љ–∞–≥—А—Г–Ј–Ї–Є. –Ю–±–∞ –і–∞—В—З–Є–Ї–∞ –њ–Њ–Ј–Є—Ж–Є–Њ–љ–љ–Њ–≥–Њ —В–Є–њ–∞. –£—Б—В–∞–љ–Њ–≤–ї–µ–љ—Л –љ–∞ –Њ—Б–Є –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є. –°–ї—Г–ґ–∞—В –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —А–µ–ґ–Є–Љ–∞ —А–∞–±–Њ—В—Л –і–≤–Є–≥–∞—В–µ–ї—П. –°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –і–∞—В—З–Є–Ї–∞ —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞ –њ—А–Є –Ј–∞–Ј–Њ—А–µ 0,2-0,6 –Љ–Љ. –Љ–µ–ґ–і—Г —А—Л—З–∞–≥–Њ–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Њ–є –Є —Г–њ–Њ—А–Њ–Љ —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞ — 0,5 –Ю–Љ. –°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –і–∞—В—З–Є–Ї–∞ –њ–Њ–ї–љ–Њ–є –љ–∞–≥—А—Г–Ј–Ї–Є –њ—А–Є —Г–≥–ї–µ 10¬±2» –Љ–µ–ґ–і—Г –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Њ–є –Є —Г–њ–Њ—А–Њ–Љ –њ–Њ–ї–љ–Њ–є –љ–∞–≥—А—Г–Ј–Ї–Є — –±–µ—Б–Ї–Њ–љ–µ—З–љ–Њ—Б—В—М.
–Я—А–Є –≤—В–Њ—А–Њ–Љ –≤–∞—А–Є–∞–љ—В–µ –і–∞—В—З–Є–Ї –њ–Њ–ї–Њ–ґ–µ–љ–Є—П –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є –њ–Њ—В–µ–љ—Ж–Є–Њ–Љ–µ—В—А–Є—З–µ—Б–Ї–Њ–≥–Њ —В–Є–њ–∞. –£—Б—В–∞–љ–Њ–≤–ї–µ–љ –љ–∞ –Њ—Б–Є –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є. –Э–∞–њ—А—П–ґ–µ–љ–Є–µ –њ—А–Є –Є–Ј–Љ–µ—А–µ–љ–Є–Є –Љ–µ–ґ–і—Г –≤—Л–≤–Њ–і–∞–Љ–Є ¬Ђ2¬ї –Є ¬Ђ3¬ї —А–∞–Ј—М–µ–Љ–∞ –і–∞—В—З–Є–Ї–∞:
— –њ—А–Є –њ–Њ–ї–Њ–ґ–µ–љ–Є–Є –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є –љ–∞ —Г–њ–Њ—А–µ —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞ –Є–ї–Є –њ–Њ–ї–љ–Њ–є –љ–∞–≥—А—Г–Ј–Ї–Є: 0-0.5–≤.
— –њ—А–Є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ—З–љ–Њ–Љ –њ–Њ–ї–Њ–ґ–µ–љ–Є–Є –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є: 4,5-5,0 –Т.
–Ъ–ї–∞–њ–∞–љ —Б—В–∞–±–Є–ї–Є–Ј–∞—Ж–Є–Є —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞
–Т–Њ–Ј–і—Г—И–љ—Л–є –Ї–ї–∞–њ–∞–љ —Б—В–∞–±–Є–ї–Є–Ј–∞—Ж–Є–Є —Е–Њ–ї–Њ—Б—В–Њ–≥–Њ —Е–Њ–і–∞ —Н–ї–µ–Ї—В—А–Њ–Љ–∞–≥–љ–Є—В–љ—Л–є, —А–Њ—В–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ —В–Є–њ–∞. –£—Б—В–∞–љ–Њ–≤–ї–µ–љ –≤ –≤–Њ–Ј–і—Г—И–љ–Њ–Љ —В—А–∞–Ї—В–µ, –њ–∞—А–∞–ї–ї–µ–ї—М–љ–Њ –Ї–Њ—А–њ—Г—Б—Г –і—А–Њ—Б—Б–µ–ї—М–љ–Њ–є –Ј–∞—Б–ї–Њ–љ–Ї–Є –Є –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –њ–Њ—Б—В–Њ—П–љ—Б—В–≤–Њ –Њ–±–Њ—А–Њ—В–Њ–≤ –і–≤–Є–≥–∞—В–µ–ї—П –љ–∞ —Е–Њ–ї–Њ—Б—В–Њ–Љ —Е–Њ–і—Г –Ј–∞ —Б—З–µ—В –Є–Ј–Љ–µ–љ–µ–љ–Є—П –њ—А–Њ—Е–Њ–і–љ–Њ–≥–Њ —Б–µ—З–µ–љ–Є—П –≤–Њ–Ј–і—Г—И–љ–Њ–≥–Њ –Ї–∞–љ–∞–ї–∞.
–Ф–∞—В—З–Є–Ї —Б–Њ–і–µ—А–ґ–∞–љ–Є—П –Ї–Є—Б–ї–Њ—А–Њ–і–∞ –≤ –≤—Л—Е–ї–Њ–њ–љ—Л—Е –≥–∞–Ј–∞—Е (–ї—П–Љ–±–і–∞-–Ј–Њ–љ–і)
–Ф–∞—В—З–Є–Ї –≤—Л–і–∞–µ—В –љ–∞ —Н–ї.–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Њ —Б–Њ–і–µ—А–ґ–∞–љ–Є–Є –Ї–Є—Б–ї–Њ—А–Њ–і–∞ –≤ –≤—Л—Е–ї–Њ–њ–љ—Л—Е –≥–∞–Ј–∞—Е. –£—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П –љ–∞ –≤—Л–њ—Г—Б–Ї–љ–Њ–Љ –Ї–Њ–ї–ї–µ–Ї—В–Њ—А–µ –і–≤–Є–≥–∞—В–µ–ї—П.
–Э–∞–њ—А—П–ґ–µ–љ–Є–µ –њ–Є—В–∞–љ–Є—П — 12 –Т.
–Т—Л—Е–Њ–і–љ–Њ–є —В–Њ–Ї — 0.5-3,0 –Р.
–Я–Њ–і—Б–Є—Б—В–µ–Љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Г–≥–ї–Њ–Љ –Њ–њ–µ—А–µ–ґ–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П
–Ю—Б–љ–Њ–≤–љ—Л–Љ–Є —Н–ї–µ–Љ–µ–љ—В–∞–Љ–Є –њ–Њ–і—Б–Є—Б—В–µ–Љ—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Г–≥–ї–Њ–Љ –Њ–њ–µ—А–µ–ґ–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П —П–≤–ї—П—О—В—Б—П: —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–є –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А, –Ї–Њ–Љ–Љ—Г—В–∞—В–Њ—А, –≤—Б—В—А–Њ–µ–љ–љ—Л–є –≤ —А–∞—Б–њ—А–µ–і–µ–ї–Є—В–µ–ї—М –Ј–∞–ґ–Є–≥–∞–љ–Є—П –і–∞—В—З–Є–Ї —З–Є—Б–ї–∞ –Њ–±–Њ—А–Њ—В–Њ–≤ –і–≤–Є–≥–∞—В–µ–ї—П (–і–∞—В—З–Є–Ї –•–Њ–ї–ї–∞), –≤—Б—В—А–Њ–µ–љ–љ—Л–є –≤ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А –і–∞—В—З–Є–Ї —А–∞–Ј—А–µ–ґ–µ–љ–Є—П, –і–∞—В—З–Є–Ї –і–µ—В–Њ–љ–∞—Ж–Є–Є, –Ї–∞—В—Г—И–Ї–∞ –Є —Б–≤–µ—З–Є –Ј–∞–ґ–Є–≥–∞–љ–Є—П. –Ф–∞—В—З–Є–Ї –і–µ—В–Њ–љ–∞—Ж–Є–Є –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Ї–Њ–љ—В—А–Њ–ї—М –Ј–∞ –љ–∞–≥—А—Г–Ј–Ї–Њ–є –і–≤–Є–≥–∞—В–µ–ї—П –Є —П–≤–ї—П–µ—В—Б—П –Њ—Б–љ–Њ–≤–љ—Л–Љ –і–ї—П —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П —Г–≥–ї–∞ –Њ–њ–µ—А–µ–ґ–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П.
–£–≥–Њ–ї –Њ–њ–µ—А–µ–ґ–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П –≤—Л—З–Є—Б–ї—П–µ—В—Б—П —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л–Љ –Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–Љ –≤ –њ—А—П–Љ–Њ–є –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –њ–Њ–Ї–∞–Ј–∞–љ–Є–є –і–∞—В—З–Є–Ї–Њ–≤, –Њ–љ –ґ–µ –Є –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Ј–∞–ґ–Є–≥–∞–љ–Є–µ–Љ.
–§—Г–љ–Ї—Ж–Є–Њ–љ–∞–ї—М–љ—Л–µ –њ–∞—А–∞–Љ–µ—В—А—Л –њ–Њ–і—Б–Є—Б—В–µ–Љ—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Г–≥–ї–Њ–Љ –Њ–њ–µ—А–µ–ґ–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П
–†–∞—Б–њ—А–µ–і–µ–ї–Є—В–µ–ї—М –Ј–∞–ґ–Є–≥–∞–љ–Є—П
–†–∞—Б–њ—А–µ–і–µ–ї–Є—В–µ–ї—М –Ј–∞–ґ–Є–≥–∞–љ–Є—П —Б –Њ—Б–µ–≤—Л–Љ–Є –≤—Л–≤–Њ–і–∞–Љ–Є, —Б –≤—Б—В—А–Њ–µ–љ–љ—Л–Љ –і–∞—В—З–Є–Ї–Њ–Љ –•–Њ–ї–ї–∞. –°–ї—Г–ґ–Є—В –і–ї—П —А–∞—Б–њ—А–µ–і–µ–ї–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П –њ–Њ —Ж–Є–ї–Є–љ–і—А–∞–Љ, –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —З–Є—Б–ї–∞ –Њ–±–Њ—А–Њ—В–Њ–≤ –і–≤–Є–≥–∞—В–µ–ї—П –Є –Љ–Њ–Љ–µ–љ—В–∞ –Є—Б–Ї—А–Њ–Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—П.
–Э–Њ–Љ–µ—А –њ–Њ –Ї–∞—В–∞–ї–Њ–≥—Г: BOSCH 0 237 520 010.
–Э–∞—З–∞–ї—М–љ—Л–є —Г–≥–Њ–ї –Њ–њ–µ—А–µ–ґ–µ–љ–Є—П –Ј–∞–ґ–Є–≥–∞–љ–Є—П –і–Њ –Т–Ь–Ґ –њ—А–Є –Њ—В–Ї–ї—О—З–µ–љ–љ–Њ–Љ —А–∞–Ј—М–µ–Љ–µ –і–∞—В—З–Є–Ї–∞ —В–µ–Љ–њ–µ—А–∞—В—Г—А—Л –Њ—Е–ї–∞–ґ–і–∞—О—Й–µ–є –ґ–Є–і–Ї–Њ—Б—В–Є — 6 –≥—А–∞–і—Г—Б–Њ–≤ +/-18 —Б–µ–Ї.
–Т—Л—Е–Њ–і–љ–Њ–µ –љ–∞–њ—А—П–ґ–µ–љ–Є–µ –і–∞—В—З–Є–Ї–∞ –•–Њ–ї–ї–∞ –њ—А–Є –Є–Ј–Љ–µ—А–µ–љ–Є–Є –Љ–µ–ґ–і—Г –≤—Л–≤–Њ–і–∞–Љ–Є «4» –Є «6¬ї —А–∞–Ј—М–µ–Љ–∞ –Ї–Њ–Љ–Љ—Г—В–∞—В–Њ—А–∞ — 0вАФ2 –Т.
–°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ —А–Њ—В–Њ—А–∞ –і–∞—В—З–Є–Ї–∞ –•–Њ–ї–ї–∞ — 0,6вАФ1,4 –Ю–Љ.
–Ъ–Њ–Љ–Љ—Г—В–∞—В–Њ—А
–Э–Њ–Љ–µ—А –њ–Њ –Ї–∞—В–∞–ї–Њ–≥—Г: BOSCH 0 227 100 142
–Ъ–∞—В—Г—И–Ї–∞ –Ј–∞–ґ–Є–≥–∞–љ–Є—П
–Ъ–∞—В—Г—И–Ї–∞ –Ј–∞–ґ–Є–≥–∞–љ–Є—П —Б –Љ–∞—А–Ї–Є—А–Њ–≤–Ї–Њ–є —Б–µ—А–Њ–≥–Њ –Є–ї–Є –Ј–µ–ї–µ–љ–Њ–≥–Њ —Ж–≤–µ—В–∞. –°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –њ–µ—А–≤–Є—З–љ–Њ–є –Њ–±–Љ–Њ—В–Ї–Є — 0,6-0,8 –Ю–Љ. –°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –≤—В–Њ—А–Є—З–љ–Њ–є –Њ–±–Љ–Њ—В–Ї–Є — 6,9-8,5 –Ї–Ю–Љ.
–≠–ї–µ–Љ–µ–љ—В—Л –њ–Њ–і–∞–≤–ї–µ–љ–Є—П —А–∞–і–Є–Њ–њ–Њ–Љ–µ—Е
–°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –њ–Њ–Љ–µ—Е–Њ–њ–Њ–і–∞–≤–Є—В–µ–ї—М–љ—Л—Е —А–µ–Ј–Є—Б—В–Њ—А–Њ–≤ -0.6-1,4 –Ї–Ю–Љ. –°–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –љ–∞–Ї–Њ–љ–µ—З–љ–Є–Ї–Њ–≤ —Б–≤–µ—З–µ–є –Ј–∞–ґ–Є–≥–∞–љ–Є—П — 4.0-6,0 –Ї–Ю–Љ
–®–Є–љ–∞ –і–∞–љ–љ—Л—Е CAN
–®–Є–љ–∞ –і–∞–љ–љ—Л—Е CAN вАФ –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–∞, –Њ–њ–Є—Б–∞–љ–Є–µ

–Ъ —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л–Љ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П–Љ –њ—А–µ–і—К—П–≤–ї—П—О—В—Б—П –≤—Б—С –±–Њ–ї–µ–µ –≤—Л—Б–Њ–Ї–Є–µ —В—А–µ–±–Њ–≤–∞–љ–Є—П. –Ґ—А–µ–±–Њ–≤–∞–љ–Є—П –Ї –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є –µ–Ј–і—Л, –Ї–Њ–Љ—Д–Њ—А—В—Г –≤–Њ –≤—А–µ–Љ—П –µ–Ј–і—Л, —Н–Ї–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Њ–є –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є –Є —Н–Ї–Њ–љ–Њ–Љ–Є—З–љ–Њ—Б—В–Є –њ–Њ—Б—В–Њ—П–љ–љ–Њ –≤–Њ–Ј—А–∞—Б—В–∞—О—В. –Э–Њ–≤—Л–µ —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ —А–∞–Ј—А–∞–±–Њ—В–Ї–Є –њ–Њ—П–≤–ї—П—О—В—Б—П –≤—Б—С –±—Л—Б—В—А–µ–µ, —Ж–µ–ї–Є —А–∞–Ј—А–∞–±–Њ—В—З–Є–Ї–Њ–≤ —Б—В–∞–љ–Њ–≤—П—В—Б—П –≤—Б—С –±–Њ–ї–µ–µ –∞–Љ–±–Є—Ж–Є–Њ–Ј–љ—Л–Љ–Є. –≠—В–Њ –Є –µ—Б—В—М –њ—А–Њ–≥—А–µ—Б—Б, –Є —Н—В–Њ —Е–Њ—А–Њ—И–Њ. –Я—А–Њ–≥—А–µ—Б—Б—Г –Љ—Л –±–ї–∞–≥–Њ–і–∞—А–љ—Л –Ј–∞ —В–∞–Ї–Є–µ –Є–Ј–Њ–±—А–µ—В–µ–љ–Є—П –Ї–∞–Ї, –љ–∞–њ—А–Є–Љ–µ—А, ABS, –њ–Њ–і—Г—И–Ї–∞ –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В–Є, –њ–Њ–ї–љ–Њ—Б—В—М—О –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–∞—П —Г—Б—В–∞–љ–Њ–≤–Ї–∞ –Є—Б–Ї—Г—Б—Б—В–≤–µ–љ–љ–Њ–≥–Њ –Ї–ї–Є–Љ–∞—В–∞; —Н—В–Њ —В–Њ–ї—М–Ї–Њ –Љ–∞–ї–∞—П –і–Њ–ї—П –њ—А–Є–Љ–µ—А–Њ–≤ –Є–Ј –Њ–≥—А–Њ–Љ–љ–Њ–≥–Њ –Ї–Њ–ї–Є—З–µ—Б—В–≤–∞ —В–µ—Е–љ–Є—З–µ—Б–Ї–Є—Е –љ–Њ–≤–Є–љ–Њ–Ї, –Ї–Њ—В–Њ—А—Л–µ –Ј–∞ –њ–Њ—Б–ї–µ–і–љ–µ–µ –і–µ—Б—П—В–Є–ї–µ—В–Є–µ –±—Л–ї–Є –≤–љ–µ–і—А–µ–љ—Л –≤ –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—О –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –С–ї–∞–≥–Њ–і–∞—А—П —Н—В–Њ–Љ—Г —А–∞–Ј–≤–Є—В–Є—О —А–∞—Б—В—С—В —В–∞–Ї–ґ–µ –і–Њ–ї—П —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ. –Т —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е, –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –Ї–ї–∞—Б—Б–∞ –Є –Њ—Б–љ–∞—Й–µ–љ–Є—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, –њ—А–Є–Љ–µ–љ—П–µ—В—Б—П –Њ—В 25 –і–Њ 60 —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ, –Ї–Њ—В–Њ—А—Л–µ –і–Њ–ї–ґ–љ—Л –±—Л—В—М –≤—Б–µ —Б–≤—П–Ј–∞–љ—Л –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є –њ—А–Њ–≤–Њ–і–љ–Њ–є —Б–≤—П–Ј—М—О. –Т –Њ–±—Л—З–љ—Л—Е –≤–Є–і–∞—Е –њ—А–Њ–≤–Њ–і–љ—Л—Е —Б–Њ–µ–і–Є–љ–µ–љ–Є–є –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Є, –Ї–∞–±–µ–ї–Є —А–∞–Ј—К—С–Љ—Л –Є –њ—А–µ–і–Њ—Е—А–∞–љ–Є—В–µ–ї—М–љ—Л–µ –Ї–Њ–ї–Њ–і–Ї–Є –Є–Љ–µ–ї–Є –Њ–≥—А–Њ–Љ–љ—Л–µ —А–∞–Ј–Љ–µ—А—Л, —Б–ї–µ–і—Б—В–≤–Є–µ–Љ —З–µ–≥–Њ –±—Л–ї–Є –Њ—З–µ–љ—М –Ј–∞—В—А–∞—В–љ—Л–µ –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–µ–љ–љ—Л–µ –њ—А–Њ—Ж–µ—Б—Б—Л. –Э–µ –≥–Њ–≤–Њ—А—П —Г–ґ–µ –Њ —В–µ—Е –њ—А–Њ–±–ї–µ–Љ–∞—Е, –Ї–Њ—В–Њ—А—Л–µ –Љ–Њ–≥–ї–Є –≤–Њ–Ј–љ–Є–Ї–љ—Г—В—М –њ—А–Є –њ—А–Њ–≤–µ–і–µ–љ–Є–Є –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–Є –і–ї—П –њ–Њ–Є—Б–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є –≤ —В–∞–Ї–Є—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е. –Ф–ї—П –Љ–µ—Е–∞–љ–Є–Ї–Њ–≤ –љ–∞—З–Є–љ–∞–ї—Б—П —Г—В–Њ–Љ–Є—В–µ–ї—М–љ—Л–є –Є –і–Њ–ї–≥–Є–є –њ–Њ–Є—Б–Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є, –Ј–∞ –Ї–Њ—В–Њ—А—Л–є –њ–ї–∞—В–Є–ї –Ї–ї–Є–µ–љ—В –Є –њ–ї–∞—В–Є–ї –і–Њ—А–Њ–≥–Њ. –Ю–±–Љ–µ–љ –і–∞–љ–љ—Л–Љ–Є –Љ–µ–ґ–і—Г —А–∞–Ј–ї–Є—З–љ—Л–Љ–Є —Г–њ—А–∞–≤–ї—П—О—Й–Є–Љ–Є —Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ–Є –њ—А–Є —В–∞–Ї–Њ–є —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є —В–∞–Ї–ґ–µ —Б—В–∞–ї–Ї–Є–≤–∞–ї—Б—П —Б –≥—А–∞–љ–Є—Ж–∞–Љ–Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ–≥–Њ.
–Ш—Б—В–Њ—А–Є—П —И–Є–љ—Л CAN
–Я–Њ—Н—В–Њ–Љ—Г –≤ 1983 –≥–Њ–і—Г –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М–љ–Њ–є –њ—А–Њ–Љ—Л—И–ї–µ–љ–љ–Њ—Б—В—М –Ј–∞—П–≤–Є–ї–∞ –Њ —Б–≤–Њ–µ–є –њ–Њ—В—А–µ–±–љ–Њ—Б—В–Є –Є–Љ–µ—В—М —В–∞–Ї—Г—О –Ї–Њ–Љ–Љ—Г–љ–Є–Ї–∞—Ж–Є–Њ–љ–љ—Г—О —Б–Є—Б—В–µ–Љ—Г, –Ї–Њ—В–Њ—А–∞—П –±—Л–ї–∞ –≤ —Б–Њ—Б—В–Њ—П–љ–Є–Є —Б–≤—П–Ј–∞—В—М —Г–њ—А–∞–≤–ї—П—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є –≤ –µ–і–Є–љ—Г—О —Б–µ—В—М, –Є –Њ–±–µ—Б–њ–µ—З–Є—В—М –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–є –Њ–±–Љ–µ–љ –і–∞–љ–љ—Л–Љ–Є. –°–Є—Б—В–µ–Љ–∞ –і–Њ–ї–ґ–љ–∞ –±—Л–ї–∞ —Г–і–Њ–≤–ї–µ—В–≤–Њ—А—П—В—М —Б–ї–µ–і—Г—О—Й–Є–Љ —В—А–µ–±–Њ–≤–∞–љ–Є—П–Љ: –љ–µ–≤—Л—Б–Њ–Ї–∞—П —Б—В–Њ–Є–Љ–Њ—Б—В—М –≤ —Б–µ—А–Є–є–љ–Њ–Љ –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–µ —Б–њ–Њ—Б–Њ–±–љ–Њ—Б—В—М —А–∞–±–Њ—В–∞—В—М –≤ —А–µ–ґ–Є–Љ–µ —А–µ–∞–ї—М–љ–Њ–≥–Њ –≤—А–µ–Љ–µ–љ–Є –і–ї—П –±—Л—Б—В—А–Њ–і–µ–є—Б—В–≤–Є—П –≤—Л—Б–Њ–Ї–∞—П –љ–∞–і—С–ґ–љ–Њ—Б—В—М –≤—Л—Б–Њ–Ї–∞—П —Б—В–µ–њ–µ–љ—М –Ј–∞—Й–Є—Й—С–љ–љ–Њ—Б—В–Є –Њ—В —Н–ї–µ–Ї—В—А–Њ–Љ–∞–≥–љ–Є—В–љ—Л—Е –њ–Њ–Љ–µ—Е
–°–∞–Љ–∞—П —А–∞—Б–њ—А–Њ—Б—В—А–∞–љ—С–љ–љ–∞—П —Б–Є—Б—В–µ–Љ–∞ –Њ–±–Љ–µ–љ–∞ –і–∞–љ–љ—Л–Љ–Є вАФ CAN-bus 1983
–Э–∞—З–∞–ї–Њ —А–∞–Ј—А–∞–±–Њ—В–Ї–Є CAN (–С–Њ—И) 1985
–Э–∞—З–∞–ї–Њ –Ї–Њ–Њ–њ–µ—А–∞—Ж–Є–Є —Б –Ш–љ—В–µ–ї –њ–Њ —А–∞–Ј—А–∞–±–Њ—В–Ї–µ —З–Є–њ–∞ 1988
–Я–µ—А–≤—Л–є —Б–µ—А–Є–є–љ—Л–є —В–Є–њ CAN –Њ—В –Ї–Њ–Љ–њ–∞–љ–Є–Є Intel –Ь–µ—А—Б–µ–і–µ—Б вАФ –С–µ–љ—Ж –љ–∞—З–Є–љ–∞–µ—В –≤–љ–µ–і—А–µ–љ–Є–µ CAN –і–ї—П –≥—А—Г–Ј–Њ–≤—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ–є 1991
–Я–µ—А–≤–Њ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ CAN –≤ —Б–µ—А–Є–є–љ–Њ–Љ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ (S-–Ї–ї–∞—Б—Б) 1994
–Т–≤–Њ–і–Є—В—Б—П –Љ–µ–ґ–і—Г–љ–∞—А–Њ–і–љ—Л–є —Б—В–∞–љ–і–∞—А—В –і–ї—П CAN (ISO 11898) 1997
–Я–µ—А–≤–Њ–µ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ CAN –≤ —Б–∞–ї–Њ–љ–µ (–°-–Ї–ї–∞—Б—Б) 2001
–Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ CAN –≤ –Љ–∞–ї–Њ–ї–Є—В—А–∞–ґ–љ—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е (–Ю–њ–µ–ї—М –Ъ–Њ—А—Б–∞) –≤ –њ—А–Є–≤–Њ–і–µ –Є –Ї—Г–Ј–Њ–≤–µ
–І—В–Њ –Њ–Ј–љ–∞—З–∞–µ—В CAN ? CAN –Њ–Ј–љ–∞—З–∞–µ—В Controller Area Network
–Я—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞ –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е CAN-BUS –Њ–±–Љ–µ–љ –і–∞–љ–љ—Л–Љ–Є –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –≤–Њ –≤—Б–µ—Е –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П—Е –Љ–µ–ґ–і—Г –љ–µ—Б–Ї–Њ–ї—М–Ї–Є–Љ–Є —Г–њ—А–∞–≤–ї—П—О—Й–Є–Љ–Є —Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ–Є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –Љ–љ–Њ–≥–Њ–Ї—А–∞—В–љ–Њ–≥–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П —Б–Є–≥–љ–∞–ї–Њ–≤ —Б–µ–љ—Б–Њ—А–љ—Л—Е –і–∞—В—З–Є–Ї–Њ–≤ –Њ—З–µ–љ—М –≤—Л—Б–Њ–Ї–∞—П —Б–Ї–Њ—А–Њ—Б—В—М –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –љ–Є–Ј–Ї–Є–є –њ—А–Њ—Ж–µ–љ—В –Њ—И–Є–±–Њ–Ї, –±–ї–∞–≥–Њ–і–∞—А—П —А–∞–Ј–ї–Є—З–љ—Л–Љ –≤–Є–і–∞–Љ –Ї–Њ–љ—В—А–Њ–ї—П –њ—А–Є –њ–µ—А–µ–і–∞—З–µ –і–∞–љ–љ—Л—Е –і–ї—П —А–∞—Б—И–Є—А–µ–љ–Є—П –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є –Њ–±—Л—З–љ–Њ –і–Њ—Б—В–∞—В–Њ—З–љ–Њ –ї–Є—И—М –≤–љ–µ—Б—В–Є –Є–Ј–Љ–µ–љ–µ–љ–Є—П –≤ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ –Њ–±–µ—Б–њ–µ—З–µ–љ–Є–µ —Б–Є—Б—В–µ–Љ–∞ CAN —Б—В–∞–љ–і–∞—А—В–Є–Ј–Њ–≤–∞–љ–∞ –≤–Њ –≤—Б—С–Љ –Љ–Є—А–µ, —Н—В–Њ –Ј–љ–∞—З–Є—В, —З—В–Њ –≤–Њ–Ј–Љ–Њ–ґ–µ–љ –Њ–±–Љ–µ–љ –і–∞–љ–љ—Л–Љ–Є –Љ–µ–ґ–і—Г —Г–њ—А–∞–≤–ї—П—О—Й–Є–Љ–Є —Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ–Є —А–∞–Ј–љ—Л—Е –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї–µ–є
–І—В–Њ —В–∞–Ї–Њ–µ CAN-BUS ?
–°–Є—Б—В–µ–Љ—Г –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е CAN-–±—Г—Б –Љ–Њ–ґ–љ–Њ –њ—А–µ–і—Б—В–∞–≤–Є—В—М –≤ –≤–Є–і–µ –∞–≤—В–Њ–±—Г—Б–∞. –Ґ–∞–Ї –ґ–µ, –Ї–∞–Ї –Є –∞–≤—В–Њ–±—Г—Б –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ –і–ї—П –њ–µ—А–µ–≤–Њ–Ј–Ї–Є –Љ–љ–Њ–ґ–µ—Б—В–≤–∞ –њ–∞—Б—Б–∞–ґ–Є—А–Њ–≤, —В–∞–Ї –Є —Б–Є—Б—В–µ–Љ–∞ CAN-–±—Г—Б –њ–µ—А–µ–і–∞—С—В –Љ–љ–Њ–ґ–µ—Б—В–≤–Њ –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є. –С–µ–Ј —Б–Є—Б—В–µ–Љ—Л CAN-–±—Г—Б –≤—Б—О –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –љ–∞–і–Њ –±—Л–ї–Њ –±—Л –њ–µ—А–µ–і–∞–≤–∞—В—М –Ї —Г–њ—А–∞–≤–ї—П—О—Й–Є–Љ —Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ –њ–Њ –Њ–≥—А–Њ–Љ–љ–Њ–Љ—Г –Ї–Њ–ї–Є—З–µ—Б—В–≤—Г –њ—А–Њ–≤–Њ–і–љ—Л—Е —Б–Њ–µ–і–Є–љ–µ–љ–Є–є. –≠—В–Њ –Њ–Ј–љ–∞—З–∞–µ—В, —З—В–Њ –і–ї—П –Ї–∞–ґ–і–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є –і–Њ–ї–ґ–µ–љ –±—Л—В—М –Њ–і–Є–љ –њ—А–Њ–≤–Њ–і–љ–Њ–є –Ї–∞–љ–∞–ї. –Я—А–Є –њ–Њ–Љ–Њ—Й–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е CAN-–±—Г—Б —З–Є—Б–ї–Њ —Г–њ—А–∞–≤–ї—П—О—Й–Є—Е —Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ–Є –Ј–∞–Љ–µ—В–љ–Њ —Г–Љ–µ–љ—М—И–∞–µ—В—Б—П. –Т–µ—Б—М –Њ–±–Љ–µ–љ –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–µ–є –Љ–µ–ґ–і—Г —Г–њ—А–∞–≤–ї—П—О—Й–Є–Љ–Є —Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ–Є –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –Љ–∞–Ї—Б–Є–Љ—Г–Љ —З–µ—А–µ–Ј –і–≤–∞ –њ—А–Њ–≤–Њ–і–љ–Є–Ї–∞. –Т –Њ–±–ї–∞—Б—В–Є –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ—Б—В—А–Њ–µ–љ–Є—П —Б—Г—Й–µ—Б—В–≤—Г—О—В —А–∞–Ј–ї–Є—З–љ—Л–µ —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є —Б–Њ–µ–і–Є–љ–µ–љ–Є–є (—Б–µ—В–µ–є).
–Ъ–Њ—А–Њ—В–Ї–Њ —А–∞—Б—Б–Љ–Њ—В—А–Є–Љ –Њ—Б–Њ–±–µ–љ–љ–Њ—Б—В–Є –љ–µ–Ї–Њ—В–Њ—А—Л—Е –Є–Ј –љ–Є—Е. –°—Е–µ–Љ–∞ ¬Ђ–Ј–≤–µ–Ј–і–∞¬ї –њ–Њ —Б—Е–µ–Љ–µ ¬Ђ–Ј–≤–µ–Ј–і–∞¬ї –≤—Б–µ —Н–ї–µ–Љ–µ–љ—В—Л –Њ–±–Љ–µ–љ–∞ –і–∞–љ–љ—Л–Љ–Є –Ј–∞–Љ—Л–Ї–∞—О—В—Б—П –љ–∞ –Њ–і–Є–љ —Ж–µ–љ—В—А (–±–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П) –µ—Б–ї–Є –±–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П –≤—Л—Е–Њ–і–Є—В –Є–Ј —Б—В—А–Њ—П, —В–Њ —Б–Њ–µ–і–Є–љ–µ–љ–Є–µ –љ–∞—А—Г—И–∞–µ—В—Б—П –°—Е–µ–Љ–∞ ¬Ђ–Ї–Њ–ї—М—Ж–Њ¬ї –њ–Њ —Б—Е–µ–Љ–µ ¬Ђ–Ї–Њ–ї—М—Ж–Њ¬ї –≤—Б–µ —Н–ї–µ–Љ–µ–љ—В—Л –Њ–±–Љ–µ–љ–∞ –і–∞–љ–љ—Л–Љ–Є —Б–∞–Љ–Њ—Б—В–Њ—П—В–µ–ї—М–љ—Л. —З—В–Њ–±—Л –њ–Њ—Б—В—Г–њ–Є—В—М —Б —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Р –љ–∞ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –Т, –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—П –і–Њ–ї–ґ–љ–∞ –њ—А–Њ–є—В–Є –њ–Њ –Љ–µ–љ—М—И–µ–є –Љ–µ—А–µ –µ—Й—С —З–µ—А–µ–Ј –Њ–і–љ–Њ —Г—Б—В—А–Њ–є—Б—В–≤–Њ. –µ—Б–ї–Є –Њ–і–љ–Њ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –≤—Л—Е–Њ–і–Є—В –Є–Ј —Б—В—А–Њ—П, —В–Њ –≤—Л—Е–Њ–і–Є—В –Є–Ј —Б—В—А–Њ—П —Б–Є—Б—В–µ–Љ–∞ –≤ —Ж–µ–ї–Њ–Љ. –Њ–±–љ–Њ–≤–ї–µ–љ–Є–µ –і–∞–љ–љ—Л—Е –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –Њ—З–µ–љ—М –ї–µ–≥–Ї–Њ, –љ–Њ –і–ї—П —Н—В–Њ–≥–Њ –љ–∞–і–Њ –≤—А–µ–Љ–µ–љ–љ–Њ –њ—А–µ–Ї—А–∞—В–Є—В—М —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є—О. –Ы–Є–љ–µ–є–љ–∞—П —Б—Е–µ–Љ–∞ —Б–Є–≥–љ–∞–ї –њ–µ—А–µ–і–∞—В—З–Є–Ї–∞ —А–∞—Б–њ—А–Њ—Б—В—А–∞–љ—П–µ—В—Б—П –њ–Њ –ї–Є–љ–Є–Є –≤ –Њ–±–Њ–Є—Е –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П—Е. –µ—Б–ї–Є –Њ–і–љ–Њ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –≤—Л—Е–Њ–і–Є—В –Є–Ј —Б—В—А–Њ—П, –Њ—Б—В–∞–ї—М–љ—Л–µ –њ—А–Њ–і–Њ–ї–ґ–∞—О—В –Њ–±–Љ–µ–љ –і–∞–љ–љ—Л–Љ–Є –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є. –£—Б—В—А–Њ–є—Б—В–≤–Њ —Б–Є—Б—В–µ–Љ—Л –Њ–±–Љ–µ–љ–∞ –і–∞–љ–љ—Л–Љ–Є –Ы–Є–љ–µ–є–љ–∞—П —Б—Е–µ–Љ–∞ –њ—А–Є–Љ–µ–љ—П–µ—В—Б—П –≤ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е —З–∞—Й–µ –≤—Б–µ–≥–Њ, –≤ –љ–∞—Б—В–Њ—П—Й–µ–є —Б—В–∞—В—М–µ —А–∞—Б—Б–Љ–∞—В—А–Є–≤–∞–µ—В—Б—П –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–µ–љ–љ–Њ —Н—В–∞ —Б—Е–µ–Љ–∞ —Б–Є—Б—В–µ–Љ—Л CAN-–±—Г—Б. –°–µ—В–µ–≤–Њ–є —Г–Ј–µ–ї: –Т –љ–µ–≥–Њ –≤—Е–Њ–і—П—В –Љ–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А, CAN-–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А –Є –±—Г—Б–і—А–∞–є–≤–µ—А –Ь–Є–Ї—А–Њ–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А: –Я—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ –і–ї—П –љ–µ–њ—А–µ—А—Л–≤–љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П CAN-–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А–Њ–Љ –Є –Њ–±—А–∞–±–Њ—В–Ї–Є –њ–µ—А–µ–і–∞–≤–∞–µ–Љ—Л—Е –Є –њ—А–Є–љ–Є–Љ–∞–µ–Љ—Л—Е –і–∞–љ–љ—Л—Е.
CAN-–Ї–Њ–љ—В—А–Њ–ї–ї–µ—А:
–Я—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ –і–ї—П –Њ–±–µ—Б–њ–µ—З–µ–љ–Є—П —А–µ–ґ–Є–Љ–Њ–≤ –њ–µ—А–µ–і–∞—З–Є –Є –њ—А–Є—С–Љ–∞.
–С—Г—Б–і—А–∞–є–≤–µ—А:
–Ю–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В —Г—А–Њ–≤–µ–љ—М –њ–µ—А–µ–і–∞—З–Є, –∞ —В–∞–Ї–ґ–µ –њ—А–Є—С–Љ–∞.
–Ъ–∞–љ–∞–ї —Б–≤—П–Ј–Є:
–Я—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –і–≤—Г—Е–ґ–Є–ї—М–љ—Л–є –њ—А–Њ–≤–Њ–і–љ–Є–Ї(–і–ї—П –Њ–±–Њ–Є—Е –≤–Є–і–Њ–≤ —Б–Є–≥–љ–∞–ї–Њ–≤: CAN-High –Є CAN-Low). –Ф–ї—П —Г–Љ–µ–љ—М—И–µ–љ–Є—П —Н–ї–µ–Ї—В—А–Њ–Љ–∞–≥–љ–Є—В–љ—Л—Е –њ–Њ–Љ–µ—Е –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Є —Н–Ї—А–∞–љ–Є—А–Њ–≤–∞–љ—Л. –Я–µ—А–µ–Љ—Л—З–Ї–∞ –±—Г—Б: –Э–∞–≥—А—Г–Ј–Њ—З–љ—Л–є —А–µ–Ј–Є—Б—В–Њ—А –≤ 120 –Т –њ—А–µ–і–Њ—В–≤—А–∞—Й–∞–µ—В –њ–Њ—П–≤–ї–µ–љ–Є–µ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞ –љ–∞ –Ї–Њ–љ—Ж–∞—Е –њ—А–Њ–≤–Њ–і–љ–Є–Ї–∞ –Є —Г—Б—В—А–∞–љ—П—О—В –Є—Б–Ї–∞–ґ–µ–љ–Є–µ —Б–Є–≥–љ–∞–ї–∞. –Ъ–∞–Ї —А–∞–±–Њ—В–∞–µ—В –±—Г—Б? –Я–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е —Б –њ–Њ–Љ–Њ—Й—М—О CAN-–±—Г—Б –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –њ–Њ –њ—А–Є–љ—Ж–Є–њ—Г —В–µ–ї–µ—Д–Њ–љ–љ–Њ–є –Ї–Њ–љ—Д–µ—А–µ–љ—Ж–Є–Є. –£—З–∞—Б—В–љ–Є–Ї (–±–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П) ¬Ђ–≤—Л—Б–Ї–∞–Ј—Л–≤–∞–µ—В¬ї —Б–≤–Њ—О –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О (–і–∞–љ–љ—Л–µ) –≤ –ї–Є–љ–Є—О –њ–µ—А–µ–і–∞—З–Є, –≤ —В–Њ –≤—А–µ–Љ—П, –Ї–∞–Ї –Њ—Б—В–∞–ї—М–љ—Л–µ —Г—З–∞—Б—В–љ–Є–Ї–Є ¬Ђ—Б–ї—Г—И–∞—О—В¬ї —Н—В—Г –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О. –Э–µ–Ї–Њ—В–Њ—А—Л–µ —Г—З–∞—Б—В–љ–Є–Ї–Є –љ–∞—Е–Њ–і—П—В —Н—В—Г –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Є–љ—В–µ—А–µ—Б–љ–Њ–є –Є –Є—Б–њ–Њ–ї—М–Ј—Г—О—В –µ—С. –Ф—А—Г–≥–Є–µ –њ–Њ–њ—А–Њ—Б—В—Г –Є–≥–љ–Њ—А–Є—А—Г—О—В –µ—С.
–Я—А–Є–Љ–µ—А:
–Р–≤—В–Њ–Љ–Њ–±–Є–ї—М –љ–∞—З–Є–љ–∞–µ—В –і–≤–Є–ґ–µ–љ–Є–µ, –љ–Њ –і–≤–µ—А—М —Б–Њ —Б—В–Њ—А–Њ–љ—Л –≤–Њ–і–Є—В–µ–ї—П –Ј–∞–Ї—А—Л—В–∞ –љ–µ–њ–ї–Њ—В–љ–Њ. –І—В–Њ–±—Л –њ—А–µ–і—Г–њ—А–µ–і–Є—В—М –≤–Њ–і–Є—В–µ–ї—П –Њ —Н—В–Њ–Љ, –Љ–Њ–і—Г–ї—О —З–µ–Ї-–Ї–Њ–љ—В—А–Њ–ї—П –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л –і–≤–µ –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є: –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М –і–≤–Є–ґ–µ—В—Б—П. –і–≤–µ—А—М —Б–Њ —Б—В–Њ—А–Њ–љ—Л –≤–Њ–і–Є—В–µ–ї—П –Њ—В–Ї—А—Л—В–∞. –Ш–љ—Д–Њ—А–Љ–∞—Ж–Є—О –≤–Њ—Б–њ—А–Є–љ–Є–Љ–∞—О—В —Б–µ–љ—Б–Њ—А–љ–Њ–≥–Њ –і–∞—В—З–Є–Ї –і–≤–µ—А–љ–Њ–≥–Њ –Ї–Њ–љ—В–∞–Ї—В–∞ / —Б–µ–љ—Б–Њ—А–љ–Њ–≥–Њ –і–∞—В—З–Є–Ї —З–Є—Б–ї–∞ –Њ–±–Њ—А–Њ—В–Њ–≤, –Є –Њ–љ–∞ –њ—А–µ–Њ–±—А–∞–Ј—Г–µ—В—Б—П –≤ —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–µ —Б–Є–≥–љ–∞–ї—Л. –≠—В–Є —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–µ —Б–Є–≥–љ–∞–ї—Л —Б–љ–Њ–≤–∞ –њ—А–µ–Њ–±—А–∞–Ј—Г—О—В—Б—П, —В–µ–њ–µ—А—М –≤ —Ж–Є—Д—А–Њ–≤—Г—О –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О, –Є –≤ –≤–Є–і–µ –і–≤–Њ–Є—З–љ–Њ–≥–Њ –Ї–Њ–і–∞ –њ–µ—А–µ—Б—Л–ї–∞—О—В—Б—П –њ–Њ –Ї–∞–љ–∞–ї—Г –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е, –њ–Њ–Ї–∞ –љ–µ –њ–Њ—Б—В—Г–њ—П—В –љ–∞ –њ—А–Є—С–Љ–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ. –І—В–Њ –ґ–µ –Ї–∞—Б–∞–µ—В—Б—П —Б–Є–≥–љ–∞–ї–∞ –Њ –≤—А–∞—Й–µ–љ–Є–Є –Ї–Њ–ї—С—Б, —В–Њ —Н—В–Њ—В —Б–Є–≥–љ–∞–ї –љ–µ–Њ–±—Е–Њ–і–Є–Љ —В–∞–Ї–ґ–µ –Є –і—А—Г–≥–Є–Љ —Г–њ—А–∞–≤–ї—П—О—Й–Є–Љ —Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ, –љ–∞–њ—А–Є–Љ–µ—А, —Г–њ—А–∞–≤–ї—П—О—Й–µ–Љ—Г —Г—Б—В—А–Њ–є—Б—В–≤—Г ABS. –Ю—В–љ–Њ—Б–Є—В—Б—П —Н—В–Њ —В–∞–Ї–ґ–µ –Є –Ї –љ–µ–Ї–Њ—В–Њ—А—Л–Љ –і—А—Г–≥–Є–Љ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П–Љ, –Ї–Њ—В–Њ—А—Л–µ –Њ—Б–љ–∞—Й–µ–љ—Л —Б–Є—Б—В–µ–Љ–Њ–є –∞–Ї—В–Є–≤–љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —Е–Њ–і–Њ–≤–Њ–є —З–∞—Б—В—М—О. –Т –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –Є–Ј–Љ–µ–љ—П–µ—В—Б—П –Ї–ї–Є—А–µ–љ—Б –і–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л –Њ–њ—В–Є–Љ–Є–Ј–Є—А–Њ–≤–∞—В—М –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П –љ–∞ –і–Њ—А–Њ–≥–µ. –Т—Б—П –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—П –њ—А–Њ—Е–Њ–і–Є—В —З–µ—А–µ–Ј –±—Г—Б –і–∞–љ–љ—Л—Е, –Є –Љ–Њ–ґ–µ—В –±—Л—В—М –њ—А–Њ–∞–љ–∞–ї–Є–Ј–Є—А–Њ–≤–∞–љ–∞ –Ї–∞–ґ–і—Л–Љ —Г—З–∞—Б—В–љ–Є–Ї–Њ–Љ.
–°–Є—Б—В–µ–Љ–∞ –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е CAN-–±—Г—Б –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є —Б–Є—Б—В–µ–Љ—Г –Љ—Г–ї—М—В–Є–Љ–∞—Б—В–µ—А вАУ —Б–Є—Б—В–µ–Љ—Г –Љ–љ–Њ–ґ–µ—Б—В–≤–µ–љ–љ–Њ–≥–Њ –і–Њ—Б—В—Г–њ–∞, —З—В–Њ –Њ–Ј–љ–∞—З–∞–µ—В —Б–ї–µ–і—Г—О—Й–µ–µ: –≤—Б–µ —Б–µ—В–µ–≤—Л–µ —Г–Ј–ї—Л (—Г–њ—А–∞–≤–ї—П—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞) —А–∞–≤–љ–Њ–Ј–љ–∞—З–љ—Л. –≤—Б–µ –Њ–љ–Є –≤ —А–∞–≤–љ–Њ–є –Љ–µ—А–µ –Є–Љ–µ—О—В –і–Њ—Б—В—Г–њ –Ї —Б–Є—Б—В–µ–Љ–µ –±—Г—Б, –Њ–±—А–∞–±–Њ—В–Ї–µ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є –Є –Ї–Њ–љ—В—А–Њ–ї—О –Њ—В–Ї–∞–Ј–Њ–≤. –Ї–∞–ґ–і—Л–є —Б–µ—В–µ–≤–Њ–є —Г–Ј–µ–ї –Є–Љ–µ–µ—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М —Б–∞–Љ–Њ—Б—В–Њ—П—В–µ–ї—М–љ–Њ –Є –±–µ–Ј –њ–Њ–Љ–Њ—Й–Є –і—А—Г–≥–Њ–≥–Њ —Б–µ—В–µ–≤–Њ–≥–Њ —Г–Ј–ї–∞ –њ–Њ–ї—Г—З–Є—В—М –і–Њ—Б—В—Г–њ –Ї –Ї–∞–љ–∞–ї—Г –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е. –µ—Б–ї–Є –Њ—В–Ї–∞–Ј—Л–≤–∞–µ—В –Њ–і–Є–љ —Б–µ—В–µ–≤–Њ–є —Г–Ј–µ–ї, —В–Њ —Н—В–Њ –љ–µ –≤—Л–Ј—Л–≤–∞–µ—В –≤—Л—Е–Њ–і–∞ –Є–Ј —Б—В—А–Њ—П –≤—Б–µ–є —Б–Є—Б—В–µ–Љ—Л –≤ —Ж–µ–ї–Њ–Љ. –Т —Б–Є—Б—В–µ–Љ–µ –Љ–љ–Њ–ґ–µ—Б—В–≤–µ–љ–љ–Њ–≥–Њ –і–Њ—Б—В—Г–њ–∞ –і–Њ—Б—В—Г–њ –Ї –њ–µ—А–µ–і–∞—З–µ —П–≤–ї—П–µ—В—Б—П –љ–µ–Ї–Њ–љ—В—А–Њ–ї–Є—А—Г–µ–Љ—Л–Љ, —В–Њ –µ—Б—В—М, –њ–Њ–Ї–∞ –Ї–∞–љ–∞–ї –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Њ—В–Ї—А—Л—В, –і–Њ—Б—В—Г–њ –Ї –љ–µ–Љ—Г –њ–Њ–ї—Г—З–∞—О—В –Љ–љ–Њ–≥–Є–µ —Б–µ—В–µ–≤—Л–µ —Г–Ј–ї—Л. –Х—Б–ї–Є –±—Л —Б–ї—Г—З–Є–ї–Њ—Б—М —В–∞–Ї, —З—В–Њ –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –±—Л–ї–∞ –њ–Њ—Б–ї–∞–љ–∞ –≤—Б—П –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—П –Њ—В –≤—Б–µ—Е –Є—Б—В–Њ—З–љ–Є–Ї–Њ–≤, —В–Њ –љ–∞—Б—В—Г–њ–Є–ї –±—Л –њ–Њ–ї–љ—Л–є —Е–∞–Њ—Б –≠—В–Њ –Љ–Њ–≥–ї–Њ –±—Л –њ—А–Є–≤–µ—Б—В–Є –Ї ¬Ђ—Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—О¬ї –і–∞–љ–љ—Л—Е. –°–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ, –љ—Г–ґ–љ–Њ —Б–ї–µ–і–Є—В—М –Ј–∞ –њ–Њ—А—П–і–Ї–Њ–Љ. –Я–Њ—Н—В–Њ–Љ—Г –≤ —Б–Є—Б—В–µ–Љ–µ CAN-–±—Г—Б —Б—Г—Й–µ—Б—В–≤—Г–µ—В —З—С—В–Ї–∞—П –Є–µ—А–∞—А—Е–Є—П вАФ –Ї—В–Њ –і–Њ–ї–ґ–µ–љ –њ–Њ—Б–ї–∞—В—М —Б–≤–Њ—О –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О —Б–∞–Љ—Л–Љ –њ–µ—А–≤—Л–Љ, –∞ –Ї—В–Њ –і–Њ–ї–ґ–µ–љ –њ–Њ–і–Њ–ґ–і–∞—В—М.
–Я—А–Є –њ—А–Њ–≥—А–∞–Љ–Љ–Є—А–Њ–≤–∞–љ–Є–Є —Б–µ—В–µ–≤—Л—Е —Г–Ј–ї–Њ–≤ –±—Л–ї–∞ –Њ–њ—А–µ–і–µ–ї–µ–љ–∞ –Њ—З–µ—А—С–і–љ–Њ—Б—В—М, –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –≤–∞–ґ–љ–Њ—Б—В–Є —В–µ—Е –Є–ї–Є –Є–љ—Л—Е –і–∞–љ–љ—Л—Е. –°–Њ–≥–ї–∞—Б–љ–Њ –Њ—З–µ—А—С–і–љ–Њ—Б—В–Є, –і–∞–љ–љ—Л–µ —Б –±–Њ–ї–µ–µ –≤—Л—Б–Њ–Ї–Є–Љ –њ—А–Є–Њ—А–Є—В–µ—В–љ—Л–Љ –њ—А–∞–≤–Њ–Љ –њ–µ—А–≤–µ–љ—Б—В–≤—Г—О—В –њ–Њ –Њ—В–љ–Њ—И–µ–љ–Є—О –Ї –і–∞–љ–љ—Л–Љ —Б –±–Њ–ї–µ–µ –љ–Є–Ј–Ї–Є–Љ –њ—А–Є–Њ—А–Є—В–µ—В–љ—Л–Љ –њ—А–∞–≤–Њ–Љ. –Х—Б–ї–Є –Є–і—С—В –Њ—В–њ—А–∞–≤–Ї–∞ –і–∞–љ–љ—Л—Е —Б —Б–µ—В–µ–≤–Њ–≥–Њ —Г–Ј–ї–∞ —Б –≤—Л—Б–Њ–Ї–Є–Љ –њ—А–Є–Њ—А–Є—В–µ—В–Њ–Љ, —В–Њ –Њ—Б—В–∞–ї—М–љ—Л–µ —Б–µ—В–µ–≤—Л–µ —Г–Ј–ї—Л –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є. –Ъ–∞–Ї –і–µ–є—Б—В–≤—Г–µ—В –Є–µ—А–∞—А—Е–Є—П (–ї–Њ–≥–Є–Ї–∞ –њ–µ—А–µ–і–∞—З–Є) –≤ —Б–Є—Б—В–µ–Љ–µ CAN-–±—Г—Б ? –Я—А–Є–Љ–µ—А: –°–Њ–Њ–±—Й–µ–љ–Є–µ, –Ї–Њ—В–Њ—А–Њ–µ –њ—А–Є—Е–Њ–і–Є—В —Б —Г–њ—А–∞–≤–ї—П—О—Й–µ–≥–Њ —Г—Б—В—А–Њ–є—Б—В–≤–∞, –Њ—В–≤–µ—З–∞—О—Й–µ–≥–Њ –Ј–∞ —В–µ—Е–љ–Є—З–µ—Б–Ї—Г—О –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В—М –Ї–∞–Ї, –љ–∞–њ—А–Є–Љ–µ—А, —Б –±–ї–Њ–Ї–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П ABS, –≤—Б–µ–≥–і–∞ –±—Г–і–µ—В –Є–Љ–µ—В—М –±–Њ–ї–µ–µ –≤—Л—Б–Њ–Ї–Є–є –њ—А–Є–Њ—А–Є—В–µ—В –њ–Њ —Б—А–∞–≤–љ–µ–љ–Є—О —Б —Б–Њ–Њ–±—Й–µ–љ–Є–µ–Љ —Б –±–ї–Њ–Ї–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ—А–Є–≤–Њ–і–Њ–Љ. –Т —Б–Є—Б—В–µ–Љ–µ CAN –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П —А–∞–Ј–ї–Є—З–Є–µ –Љ–µ–ґ–і—Г –і–Њ–Љ–Є–љ–∞–љ—В–љ—Л–Љ–Є –Є —А–µ—Ж–µ—Б—Б–Є–≤–љ—Л–Љ–Є —Г—А–Њ–≤–љ—П–Љ–Є –њ–µ—А–µ–і–∞—З–Є. –†–µ—Ж–µ—Б—Б–Є–≤–љ—Л–є —Г—А–Њ–≤–µ–љ—М –Є–Љ–µ–µ—В –Ј–љ–∞—З–µ–љ–Є–µ 1, –∞ –і–Њ–Љ–Є–љ–∞–љ—В–љ—Л–є —Г—А–Њ–≤–µ–љ—М –Є–Љ–µ–µ—В –Ј–љ–∞—З–µ–љ–Є–µ 0. –Ґ–µ–њ–µ—А—М, –µ—Б–ї–Є –Љ–љ–Њ–≥–Є–µ –±–ї–Њ–Ї–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –њ–Њ—Б—Л–ї–∞—О—В –њ–µ—А–µ–і–∞—З–Є –і–Њ–Љ–Є–љ–∞–љ—В–љ–Њ–≥–Њ –Є —А–µ—Ж–µ—Б—Б–Є–≤–љ–Њ–≥–Њ —Г—А–Њ–≤–љ—П, —В–Њ —Г–њ—А–∞–≤–ї—П—О—Й–µ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ —Б –і–Њ–Љ–Є–љ–∞–љ—В–љ—Л–Љ —Г—А–Њ–≤–љ–µ–Љ –Є–Љ–µ–µ—В –њ—А–∞–≤–Њ –Њ—В–њ—А–∞–≤–Є—В—М —Б–≤–Њ—С —Б–Њ–Њ–±—Й–µ–љ–Є–µ –≤ –њ–µ—А–≤—Г—О –Њ—З–µ—А–µ–і—М. –Э–∞ —Н—В–Њ–Љ –њ—А–Є–Љ–µ—А–µ –Љ–Њ–ґ–љ–Њ –µ—Й—С —А–∞–Ј –Њ–±—К—П—Б–љ–Є—В—М –і–Њ—Б—В—Г–њ –Ї –њ–µ—А–µ–і–∞—З–µ –і–∞–љ–љ—Л—Е. –Т –і–∞–љ–љ–Њ–Љ —Б–ї—Г—З–∞–µ —В—А–Є —Б–µ—В–µ–≤—Л–µ —Г–Ј–ї–∞ —Е–Њ—В—П—В –њ–µ—А–µ–і–∞—В—М –њ–Њ —Б–Є—Б—В–µ–Љ–µ —Б–≤–Њ–Є –і–∞–љ–љ—Л–µ. –Т–Њ –≤—А–µ–Љ—П –њ—А–Њ—Ж–µ—Б—Б–∞ –∞—А–±–Є—В—А–∞–ґ–љ–Њ–є –Њ—Ж–µ–љ–Ї–Є вАФ –≤—Л–±–Њ—А–∞ –Њ—З–µ—А—С–і–љ–Њ—Б—В–Є вАФ –±–ї–Њ–Ї —Г–њ—А–∞–≤–ї–µ–љ–Є—П S1 –њ—А–µ—А–≤—С—В —Б–≤–Њ—О –њ–Њ–њ—Л—В–Ї—Г –њ–µ—А–µ–і–∞—З–Є –≤ –њ—Г–љ–Ї—В–µ –Р, —В–∞–Ї –µ–≥–Њ —А–µ—Ж–µ—Б—Б–Є–≤–љ—Л–є —Г—А–Њ–≤–µ–љ—М –њ—А–µ–Њ–і–Њ–ї–µ–≤–∞–µ—В—Б—П –і–Њ–Љ–Є–љ–∞–љ—В–љ—Л–Љ–Є —Г—А–Њ–≤–љ—П–Љ–Є –і—А—Г–≥–Є—Е —Г–њ—А–∞–≤–ї—П—О—Й–Є—Е —Г—Б—В—А–Њ–є—Б—В–≤ S2 –Є S3. –£–њ—А–∞–≤–ї—П—О—Й–µ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ S2 –њ—А–µ—А–≤—С—В —Б–≤–Њ—О –њ–Њ–њ—Л—В–Ї—Г –њ–µ—А–µ–і–∞—З–Є –≤ –њ—Г–љ–Ї—В–µ –Т –њ–Њ —В–Њ–є –ґ–µ —Б–∞–Љ–Њ–є –њ—А–Є—З–Є–љ–µ, —З—В–Њ –±—Л–ї–∞ —Г–Ї–∞–Ј–∞–љ–∞ —А–∞–љ–µ–µ. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ –≤–µ—А—Е –Њ–і–µ—А–ґ–Є–≤–∞–µ—В —Г–њ—А–∞–≤–ї—П—О—Й–µ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ S3, –Њ–љ–Њ –Љ–Њ–ґ–µ—В —В–µ–њ–µ—А—М –њ–µ—А–µ–і–∞—В—М —Б–≤–Њ—С —Б–Њ–Њ–±—Й–µ–љ–Є–µ.
–І—В–Њ —В–∞–Ї–Њ–µ –њ—А–Њ—В–Њ–Ї–Њ–ї –і–∞–љ–љ—Л—Е ?
–Я–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –њ–Њ –њ—А–Њ—В–Њ–Ї–Њ–ї—Г –і–∞–љ–љ—Л—Е –≤ –Њ—З–µ–љ—М –Ї–Њ—А–Њ—В–Ї–Є–µ –њ—А–Њ–Љ–µ–ґ—Г—В–Ї–Є –≤—А–µ–Љ–µ–љ–Є. –Я—А–Њ—В–Њ–Ї–Њ–ї —Б–Њ—Б—В–Њ–Є—В –Є–Ј –Њ–≥—А–Њ–Љ–љ–Њ–≥–Њ –Ї–Њ–ї–Є—З–µ—Б—В–≤–∞ –±–Є—В –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є, —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–љ—Л—Е –≤ –Њ–њ—А–µ–і–µ–ї—С–љ–љ–Њ–Љ –њ–Њ—А—П–і–Ї–µ. –І–Є—Б–ї–Њ –±–Є—В –Ј–∞–≤–Є—Б–Є—В –Њ—В –≤–µ–ї–Є—З–Є–љ—Л –њ–Њ–ї—П –і–∞–љ–љ—Л—Е. –С–Є—В —П–≤–ї—П–µ—В—Б—П –љ–∞–Є–Љ–µ–љ—М—И–µ–є –µ–і–Є–љ–Є—Ж–µ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є, –≤–Њ—Б–µ–Љ—М –±–Є—В –Њ–±—А–∞–Ј—Г—О—В –±–∞–є—В = –њ–Њ—Б–ї–∞–љ–Є–µ. –≠—В–Њ –њ–Њ—Б–ї–∞–љ–Є–µ –Є–Љ–µ–µ—В —Ж–Є—Д—А–Њ–≤—Г—О —Д–Њ—А–Љ—Г, –Є –Љ–Њ–ґ–µ—В –≤—Л—А–∞–ґ–∞—В—М—Б—П –Ј–љ–∞—З–µ–љ–Є—П–Љ–Є 0 –Є–ї–Є 1. –Я–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е CAN-–±—Г—Б –≤ –ї–µ–≥–Ї–Њ–≤–Њ–Љ –Р–≤—В–Њ–Љ–Њ–±–Є–ї–µ –Т –љ–∞—И–Є –і–љ–Є –≤ —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е –љ–∞—Е–Њ–і—П—В –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ 2 —Б–Є—Б—В–µ–Љ—Л CAN-–±—Г—Б: –Т—Л—Б–Њ–Ї–Њ—Б–Ї–Њ—А–Њ—Б—В–љ–∞—П –њ–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е вАУ High=Speed-Bus (ISO 11898) SAE CAN Class C. –њ–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е 125 –Ъ–±–Є—В/—Б–µ–Ї вАУ 1–Ь–±–Є—В/—Б–µ–Ї. –њ—А–Њ—В—П–ґ—С–љ–љ–Њ—Б—В—М –њ–µ—А–µ–і–∞—З–Є –і–Њ 40 –Љ–µ—В—А–Њ–≤ –њ—А–Є 1 –Ь–±–Є—В/—Б–µ–Ї. –≤—Л—Е–Њ–і–љ–Њ–є —В–Њ–Ї –њ–µ—А–µ–і–∞—З–Є > 25 –Љ–Р. —Б–Є—Б—В–µ–Љ–∞ —Г—Б—В–Њ–є—З–Є–≤–∞ –Ї –Ї–Њ—А–Њ—В–Ї–Њ–Љ—Г –Ј–∞–Љ—Л–Ї–∞–љ–Є—О . –љ–Є–Ј–Ї–Њ–µ –њ–Њ—В—А–µ–±–ї–µ–љ–Є–µ —В–Њ–Ї–∞. –і–Њ 30 —Б–µ—В–µ–≤—Л—Е —Г–Ј–ї–Њ–≤. –С–ї–∞–≥–Њ–і–∞—А—П —Б–≤–Њ–µ–є –≤—Л—Б–Њ–Ї–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е (–њ–µ—А–µ–і–∞—З–∞ –Ї—А–Є—В–Є—З–µ—Б–Ї–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є –≤ —А–µ–ґ–Є–Љ–µ —А–µ–∞–ї—М–љ–Њ–≥–Њ –≤—А–µ–Љ–µ–љ–Є –Ј–∞ –Љ–Є–ї–ї–Є—Б–µ–Ї—Г–љ–і—Л), —Н—В–∞ –±—Г—Б-—Б–Є—Б—В–µ–Љ–∞ –љ–∞—И–ї–∞ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –≤ –∞–≥—А–µ–≥–∞—В–∞—Е –њ—А–Є–≤–Њ–і–∞, –≥–і–µ —Б–≤—П–Ј–∞–љ—Л –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є –≤ –µ–і–Є–љ—Г—О —Б–µ—В—М –±–ї–Њ–Ї–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–Є–≥–∞—В–µ–ї–µ–Љ, —В—А–∞–љ—Б–Љ–Є—Б—Б–Є–µ–є, —Е–Њ–і–Њ–≤–Њ–є —З–∞—Б—В—М—О –Є —В–Њ—А–Љ–Њ–Ј–∞–Љ–Є. –Э–Є–Ј–Ї–Њ—Б–Ї–Њ—А–Њ—Б—В–љ–∞—П –њ–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е вАУ Low-Speed-Bus (ISO 11519-2) SAE CAN Class –Т. –њ–µ—А–µ–і–∞—З–∞ –і–∞–љ–љ—Л—Е 10 –Ъ–±–Є—В/—Б–µ–Ї вАУ 125 –Ъ–±–Є—В/—Б–µ–Ї. –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–∞—П –њ—А–Њ—В—П–ґ—С–љ–љ–Њ—Б—В—М –њ–µ—А–µ–і–∞—З–Є –Ј–∞–≤–Є—Б–Є—В –Њ—В –Њ–±—К—С–Љ–∞ –њ–µ—А–µ–і–∞—З–Є. –≤—Л—Е–Њ–і–љ–Њ–є —В–Њ–Ї –њ–µ—А–µ–і–∞—З–Є < 1 –Љ–Р. —Б–Є—Б—В–µ–Љ–∞ —Г—Б—В–Њ–є—З–Є–≤–∞ –Ї –Ї–Њ—А–Њ—В–Ї–Њ–Љ—Г –Ј–∞–Љ—Л–Ї–∞–љ–Є—О. –љ–Є–Ј–Ї–Њ–µ –њ–Њ—В—А–µ–±–ї–µ–љ–Є–µ —В–Њ–Ї–∞. –і–Њ 32 —Б–µ—В–µ–≤—Л—Е —Г–Ј–ї–Њ–≤. –≠—В–∞ —Б–Є—Б—В–µ–Љ–∞ –љ–∞—Е–Њ–і–Є—В —Б–≤–Њ—С –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –≤ —Б–∞–ї–Њ–љ–µ, –≥–і–µ —Б–≤—П–Ј–∞–љ—Л –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є –≤ –µ–і–Є–љ—Г—О —Б–µ—В—М –Ї–Њ–Љ–њ–Њ–љ–µ–љ—В—Л —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л—Е —Г–Ј–ї–Њ–≤ –Ї—Г–Ј–Њ–≤–∞ –±–Њ—А—В–Њ–≤–Њ–є —Н–ї–µ–Ї—В—А–Њ–љ–Є–Ї–Є, –Њ—В–≤–µ—З–∞—О—Й–µ–є –Ј–∞ –Ї–Њ–Љ—Д–Њ—А—В.¬† –Ф–Є–∞–≥–љ–Њ—Б—В–Є–Ї–∞ —Б–Є—Б—В–µ–Љ—Л CAN-BUS –Т–Њ–Ј–Љ–Њ–ґ–љ—Л–µ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є —Б–Є—Б—В–µ–Љ—Л CAN-–±—Г—Б: –Њ–±—А—Л–≤ –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Њ–≤. –Ј–∞–Љ—Л–Ї–∞–љ–Є–µ –љ–∞ –Љ–∞—Б—Б—Г. –Ј–∞–Љ—Л–Ї–∞–љ–Є–µ –љ–∞ –±–∞—В–∞—А–µ—О –Ј–∞–Љ—Л–Ї–∞–љ–Є–µ CAN-High / CAN-Low.. c–ї–Є—И–Ї–Њ–Љ –љ–Є–Ј–Ї–Њ–µ –љ–∞–њ—А—П–ґ–µ–љ–Є–µ –њ–Є—В–∞–љ–Є—П / —А–∞–Ј—А—П–ґ–µ–љ –∞–Ї–Ї—Г–Љ—Г–ї—П—В–Њ—А. –Њ—В—Б—Г—В—Б—В–≤–Є–µ —А–µ–Ј–Є—Б—В–Њ—А–љ—Л—Е –њ–µ—А–µ–Љ—Л—З–µ–Ї. –љ–∞–њ—А—П–ґ–µ–љ–Є—П –њ–Њ–Љ–µ—Е, –љ–∞–њ—А–Є–Љ–µ—А, –љ–µ–Є—Б–њ—А–∞–≤–љ–∞—П –Ї–∞—В—Г—И–Ї–∞ –Ј–∞–ґ–Є–≥–∞–љ–Є—П, —З—В–Њ –≤—Л–Ј—Л–≤–∞–µ—В –Є—Б–Ї–∞–ґ–µ–љ–Є–µ —Б–Є–≥–љ–∞–ї–∞. –Я–Њ–Є—Б–Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є: –њ—А–Њ–≤–µ—А–Є—В—М —А–∞–±–Њ—В—Г —Б–Є—Б—В–µ–Љ—Л. –Ј–∞–њ—А–Њ—Б–Є—В—М –±–∞–љ–Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є. –Њ–Ј–љ–∞–Ї–Њ–Љ–Є—В—М—Б—П —Б –њ–µ—А–µ—З–љ–µ–Љ –Є–Ј–Љ–µ—А–µ–љ–љ—Л—Е —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї. –≤—Л–≤–µ—Б—В–Є —Б–Є–≥–љ–∞–ї –љ–∞ —Н–Ї—А–∞–љ –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞. –њ—А–Њ–≤–µ—А–Є—В—М –њ–Њ—А–Њ–≥–Њ–≤–Њ–µ –љ–∞–њ—А—П–ґ–µ–љ–Є–µ. –Є–Ј–Љ–µ—А–Є—В—М —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Њ–≤. –Є–Ј–Љ–µ—А–Є—В—М —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ —А–µ–Ј–Є—Б—В–Њ—А–љ—Л—Е –њ–µ—А–µ–Љ—Л—З–µ–Ї.
–Я–Њ–Є—Б–Ї –њ—А–Є—З–Є–љ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є
–Я–µ—А–µ–і –љ–∞—З–∞–ї–Њ–Љ –њ–Њ–Є—Б–Ї–∞ –њ—А–Є—З–Є–љ—Л –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –љ–µ—В –ї–Є –≤ –і–∞–љ–љ–Њ–Љ –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л—Е —Г—Б—В—А–Њ–є—Б—В–≤, –Ї–Њ—В–Њ—А—Л–µ –Є–Љ–µ—О—В –≤ —Б–Є—Б—В–µ–Љ–µ –њ–µ—А–µ–і–∞—З–Є –і–Њ—Б—В—Г–њ –Ї –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є —Б–Є—Б—В–µ–Љ—Л –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е. –Ь–Њ–ґ–µ—В —Б–ї—Г—З–Є—В—М—Б—П, —З—В–Њ –≤ —А–µ–Ј—Г–ї—М—В–∞—В–µ –њ—А–Њ–љ–Є–Ї–љ–Њ–≤–µ–љ–Є—П –≤ —Б–Є—Б—В–µ–Љ—Г –Њ–љ–∞ –±—Л–ї–∞ –љ–∞—А—Г—И–µ–љ–∞. –Т–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –њ–Њ–Є—Б–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є –≤ —Б–Є—Б—В–µ–Љ–µ –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Ј–∞–≤–Є—Б—П—В –Њ—В –Љ–љ–Њ–≥–Є—Е —Д–∞–Ї—В–Њ—А–Њ–≤. –†–µ—И–∞—О—Й–Є–Љ —П–≤–ї—П–µ—В—Б—П —В–Њ, –Ї–∞–Ї–Є–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –њ—А–µ–і–Њ—Б—В–∞–≤–Є–ї –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М. –≠—В–Њ –Љ–Њ–ґ–µ—В –±—Л—В—М –њ–Њ–Є—Б–Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є —Б –њ–Њ–Љ–Њ—Й—М—О –њ—А–Є–±–Њ—А–∞ –і–ї—П –і–Є–∞–≥–љ–Њ—Б—В–Є–Ї–Є, –µ—Б–ї–Є –≤ –Т–∞—И–µ–Љ —А–∞—Б–њ–Њ—А—П–ґ–µ–љ–Є–Є –љ–∞—Е–Њ–і–Є—В—Б—П –њ–Њ–і—Е–Њ–і—П—Й–Є–є –њ—А–Є–±–Њ—А, –Є–ї–Є –Т—Л —А–∞—Б–њ–Њ–ї–∞–≥–∞–µ—В–µ ¬Ђ—В–Њ–ї—М–Ї–Њ¬ї —В–µ—Б—В–µ—А–Њ–Љ –Є –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–Њ–Љ. –Ґ–∞–Ї–ґ–µ –Њ—З–µ–љ—М –≤–∞–ґ–љ–Њ –Є–Љ–µ—В—М –≤ —Б–≤–Њ—С–Љ —А–∞—Б–њ–Њ—А—П–ґ–µ–љ–Є–Є —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л–µ –і–∞–љ–љ—Л–µ –њ–Њ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—О (—Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є–µ —Б—Е–µ–Љ—Л, –њ–Њ–і—А–Њ–±–љ–Њ–µ –Њ–њ–Є—Б–∞–љ–Є–µ —Б–Є—Б—В–µ–Љ—Л –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е –Є —В.–і.), –≤–Њ –Є–Ј–±–µ–ґ–∞–љ–Є–µ —А–∞–Ј—А—Л–≤–∞ —Б–µ—В–µ–≤–Њ–≥–Њ –µ–і–Є–љ—Б—В–≤–∞ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –Т–Њ –≤—А–µ–Љ—П –њ–Њ–Є—Б–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є, –≤—Б—С —А–∞–≤–љ–Њ, —Б –њ–Њ–Љ–Њ—Й—М—О —В–µ—Б—В–µ—А–∞ –Є–ї–Є –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –і–µ–є—Б—В–≤–Њ–≤–∞—В—М –њ–Њ –Њ–њ–µ—А–∞—Ж–Є—П–Љ, –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М —Б—В—А—Г–Ї—В—Г—А–љ—Л–є –њ–Њ–і—Е–Њ–і. –≠—В–Њ –Њ–Ј–љ–∞—З–∞–µ—В, —З—В–Њ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В—М –Љ–Њ–ґ–љ–Њ –ї–Њ–Ї–∞–ї–Є–Ј–Њ–≤–∞—В—М –њ—А–Њ—Б—В—Л–Љ ¬Ђ–њ—А–Њ—Й—Г–њ—Л–≤–∞–љ–Є–µ–Љ¬ї, —В–Њ –µ—Б—В—М –Њ–њ—А–Њ–±–Њ–≤–∞—В—М –≤ —А–∞–±–Њ—В–µ, —З—В–Њ–±—Л –Њ–≥—А–∞–љ–Є—З–Є—В—М—Б—П –≤ –і–∞–ї—М–љ–µ–є—И–µ–Љ —В–Њ–ї—М–Ї–Њ —Б–∞–Љ—Л–Љ–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–Љ–Є –Є–Ј–Љ–µ—А–µ–љ–Є—П–Љ–Є.
–Ф–ї—П —В–Њ–≥–Њ, —З—В–Њ –Т—Л –Љ–Њ–≥–ї–Є —Б–µ–±–µ —Н—В–Њ –њ—А–µ–і—Б—В–∞–≤–Є—В—М –љ–∞–≥–ї—П–і–љ–µ–µ, –≤–Њ–Ј—М–Љ—С–Љ –≤ –Ї–∞—З–µ—Б—В–≤–µ –њ—А–Є–Љ–µ—А–∞ –њ–Њ–Є—Б–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –Ї–Њ–љ–Ї—А–µ—В–љ—Л–є –∞–≤—В–Њ–Љ–Њ–±–Є–ї—М. –Т –љ–∞—И–µ–Љ —Б–ї—Г—З–∞–µ —Н—В–Њ –±—Г–і–µ—В –Ь–µ—А—Б–µ–і–µ—Б- –С–µ–љ—Ж –Х-–Ї–ї–∞—Б—Б–∞ (–Ї—Г–Ј–Њ–≤ W210). –С—Л–ї–Њ –Ј–∞—П–≤–ї–µ–љ–Њ –Њ —Б–ї–µ–і—Г—О—Й–µ–є –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є: –°—В–µ–Ї–ї–Њ–њ–Њ–і—К—С–Љ–љ–Є–Ї —Б–Њ —Б—В–Њ—А–Њ–љ—Л –њ–∞—Б—Б–∞–ґ–Є—А–∞ –љ–µ —А–∞–±–Њ—В–∞–µ—В.
–Я—А–Њ–≤–µ—А–Ї–∞ —А–∞–±–Њ—В–Њ—Б–њ–Њ—Б–Њ–±–љ–Њ—Б—В–Є:
1. –Ь–Њ–ґ–љ–Њ –ї–Є –≤–Њ–Ј–і–µ–є—Б—В–≤–Њ–≤–∞—В—М –љ–∞ —Б—В–µ–Ї–ї–Њ–њ–Њ–і—К—С–Љ–љ–Є–Ї —Б –Љ–µ—Б—В–∞ –≤–Њ–і–Є—В–µ–ї—П? –Ф–∞: –Т —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –Њ–±–∞ —Г—Б—В—А–Њ–є—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–µ—А—П–Љ–Є, –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Є —Б–Є—Б—В–µ–Љ—Л CAN- –±—Г—Б –Є —Н–ї–µ–Ї—В—А–Њ–і–≤–Є–≥–∞—В–µ–ї—М —Б—В–µ–Ї–ї–Њ–њ–Њ–і—К—С–Љ–љ–Є–Ї–∞ –љ–∞—Е–Њ–і—П—В—Б—П –≤ —А–∞–±–Њ—З–µ–Љ —Б–Њ—Б—В–Њ—П–љ–Є–Є. –Э–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В—М –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П, –≤–µ—А–Њ—П—В–љ–Њ, –≤ –њ–Њ–ї–Њ–Љ–Ї–µ –≤—Л–Ї–ї—О—З–∞—В–µ–ї—П —Б—В–µ–Ї–ї–Њ–њ–Њ–і—К—С–Љ–љ–Є–Ї–∞ —Б–Њ —Б—В–Њ—А–Њ–љ—Л –њ–∞—Б—Б–∞–ґ–Є—А–∞. –Э–µ—В: –Ь–Њ–ґ–љ–Њ –ї–Є –≤–Њ—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П –і—А—Г–≥–Є–Љ–Є —Д—Г–љ–Ї—Ж–Є—П–Љ–Є (–љ–∞–њ—А–Є–Љ–µ—А, –Є–Ј–Љ–µ–љ–Є—В—М –њ–Њ–ї–Њ–ґ–µ–љ¬≠–Є–µ –Ј–µ—А–Ї–∞–ї–∞)? –Х—Б–ї–Є –Љ–Њ–ґ–љ–Њ –≤–Њ—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П –і—А—Г–≥–Є–Љ–Є —Д—Г–љ–Ї—Ж–Є—П–Љ–Є, —В–Њ –љ—Г–ґ–љ–Њ –Є—Б—Е–Њ–і–Є—В—М –Є–Ј —В–Њ–≥–Њ, —З—В–Њ —Г—Б—В—А–Њ–є—Б—В–≤–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П–Љ–Є –і–≤–µ—А—П–Љ–Є –Є —Б–Є—Б—В–µ–Љ–∞ CAN-–±—Г—Б –љ–∞—Е–Њ–і—П—В—Б—П –≤ —А–∞–±–Њ—З–µ–Љ —Б–Њ—Б—В–Њ—П–љ–Є–Є. –Т–Њ–Ј–Љ–Њ–ґ–љ–Њ–є –њ—А–Є—З–Є–љ–Њ–є –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є —П–≤–ї—П–µ—В—Б—П –њ–Њ–ї–Њ–Љ–Ї–∞ –≤—Л–Ї–ї—О—З–∞—В–µ–ї—П —Б—В–µ–Ї–ї–Њ–њ–Њ–і—К—С–Љ–љ–Є–Ї–∞ —Б–Њ —Б—В–Њ—А–Њ–љ—Л –≤–Њ–і–Є—В–µ–ї—П –Є–ї–Є —Н–ї–µ–Ї—В—А–Њ–і–≤–Є–≥–∞—В–µ–ї—П —Б—В–µ–Ї–ї–Њ–њ–Њ–і—К—С–Љ–љ–Є–Ї–∞ —Б–Њ —Б—В–Њ—А–Њ–љ—Л –њ–∞—Б—Б–∞–ґ–Є—А–∞. –≠—В–Њ –Љ–Њ–ґ–љ–Њ –≤—Л—П—Б–љ–Є—В—М, –µ—Б–ї–Є –њ—А–Њ–≤–µ—А–Є—В—М —Н—В—Г —Д—Г–љ–Ї—Ж–Є—О —Б –Љ–µ—Б—В–∞ –њ–∞—Б—Б–∞–ґ–Є—А–∞. –Х—Б–ї–Є —Б—В–µ–Ї–ї–Њ–њ–Њ–і—К—С–Љ–љ–Є–Ї —А–∞–±–Њ—В–∞–µ—В, —В–Њ —Н–ї–µ–Ї—В—А–Њ–і–≤–Є–≥–∞—В–µ–ї—М –Љ–Њ–ґ–љ–Њ –Є—Б–Ї–ї—О—З–Є—В—М. –Ф–ї—П –њ–Њ–Є—Б–Ї–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –љ—Г–ґ–љ–Њ —Б–Њ—Б—А–µ–і–Њ—В–Њ—З–Є—В—М—Б—П –љ–∞ –≤—Л–Ї–ї—О—З–∞—В–µ–ї–µ —Б–Њ —Б—В–Њ—А–Њ–љ—Л –≤–Њ–і–Є—В–µ–ї—П. –Х—Б–ї–Є —Б –Љ–µ—Б—В–∞ –≤–Њ–і–Є—В–µ–ї—П –љ–µ–ї—М–Ј—П –њ—А–Є–≤–µ—Б—В–Є –≤ –і–µ–є—Б—В–≤–Є–µ –љ–Є –Њ–і–љ—Г –Є–Ј —Д—Г–љ–Ї—Ж–Є–є –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є—П, –љ–∞—Е–Њ–і—П—Й–µ–≥–Њ—Б—П –љ–∞ —Б—В–Њ—А–Њ–љ–µ –њ–∞—Б—Б–∞–ґ–Є—А–∞, —В–Њ –≤–њ–Њ–ї–љ–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ, —З—В–Њ –њ—А–Є—З–Є–љ–Њ–є –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є —П–≤–ї—П–µ—В—Б—П –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В—М —Б–Є—Б—В–µ–Љ—Л CAN-–±—Г—Б –Є–ї–Є –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В—М —Г–њ—А–∞–≤–ї—П—О—Й–µ–≥–Њ —Г—Б—В—А–Њ–є—Б—В–≤–∞. –°—А–∞–≤–љ–µ–љ–Є–µ –њ—А–∞–≤–Є–ї—М–љ–Њ–≥–Њ –Є –љ–µ–њ—А–∞–≤–Є–ї—М–љ–Њ–≥–Њ –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–є –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞¬†¬† –Ф–ї—П –њ–Њ–і–Ї–ї—О—З–µ–љ–Є—П –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞ –Ї —Б–Є—Б—В–µ–Љ–µ CAN-–±—Г—Б –љ—Г–ґ–љ–Њ –љ–∞–є—В–Є –њ–Њ–і—Е–Њ–і—П—Й–µ–µ –Љ–µ—Б—В–Њ –і–ї—П –њ–Њ–і–Ї–ї—О—З–µ–љ–Є—П. –Ъ–∞–Ї –њ—А–∞–≤–Є–ї–Њ, –Њ–љ–Њ –љ–∞—Е–Њ–і–Є—В—Б—П –љ–∞ —А–∞–Ј—К—С–Љ–љ–Њ–Љ —Б–Њ–µ–і–Є–љ–µ–љ–Є–Є –Љ–µ–ґ–і—Г —Г–њ—А–∞–≤–ї—П—О—Й–Є–Љ —Г—Б—В—А–Њ–є—Б—В–≤–Њ–Љ –Є –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Њ–Љ –і–∞–љ–љ—Л—Е CAN-–±—Г—Б. –Т –љ–∞—И–µ–Љ –њ—А–Є–Љ–µ—А–µ —Б–Њ —Б—В–Њ—А–Њ–љ—Л –њ–∞—Б—Б–∞–ґ–Є—А–∞, –≤ –Ї–∞–±–µ–ї—М–љ–Њ–Љ –Ї–∞–љ–∞–ї–µ –њ–Њ–і —И–≤–µ–ї–ї–µ—А–љ–Њ–є –њ–ї–∞–љ–Ї–Њ–є (—Б–Љ–Њ—В—А–Є —А–Є—Б—Г–љ–Њ–Ї), –љ–∞—Е–Њ–і–Є—В—Б—П —А–∞—Б–њ—А–µ–і–µ–ї–Є—В–µ–ї—М –њ–Њ—В–µ–љ—Ж–Є–∞–ї–Њ–≤.¬†¬† –Ч–і–µ—Б—М –Њ—В–і–µ–ї—М–љ—Л–µ –њ—А–Њ–≤–Њ–і–љ–Є–Ї–Є CAN-–±—Г—Б –Њ—В —Г–њ—А–∞–≤–ї—П—О—Й–Є—Е —Г—Б—В—А–Њ–є—Б—В–≤ —Б—Е–Њ–і—П—В—Б—П –≤–Љ–µ—Б—В–µ. –Ъ —А–∞—Б–њ—А–µ–і–µ–ї–Є—В–µ–ї—О –њ–Њ—В–µ–љ—Ж–Є–∞–ї–Њ–≤ –Љ–Њ–ґ–љ–Њ –њ–Њ–і–Ї–ї—О—З–Є—В—М –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ –±–µ–Ј–Њ–≤—Б—П–Ї–Є—Е —В—А—Г–і–љ–Њ—Б—В–µ–є. –Х—Б–ї–Є –љ–∞ –њ–Њ–і–Ї–ї—О—З—С–љ–љ–Њ–Љ –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–µ –љ–µ –љ–∞–±–ї—О–і–∞–µ—В—Б—П –љ–Є–Ї–∞–Ї–Њ–≥–Њ —Б–Є–≥–љ–∞–ї–∞, —В–Њ –љ–∞–ї–Є—Ж–Њ –љ–∞—А—Г—И–µ–љ–Є–µ –њ–µ—А–µ–і–∞—З–Є –і–∞–љ–љ—Л—Е CAN-–±—Г—Б. –Ф–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л –Њ–њ—А–µ–і–µ–ї–Є—В—М, –≤ –Ї–∞–Ї–Њ–Љ –Є–Љ–µ–љ–љ–Њ –Љ–µ—Б—В–µ –љ–∞—Е–Њ–і–Є—В—Б—П –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В—М, —В–µ–њ–µ—А—М –љ—Г–ґ–љ–Њ –Њ—В—Б–Њ–µ–і–Є–љ–Є—В—М –Њ—В–і–µ–ї—М–љ—Л–µ —А–∞–Ј—К—С–Љ—Л. –Я—А–Є —Н—В–Њ–Љ –љ–∞–±–ї—О–і–∞—В—М –Ј–∞ –њ–Њ–Ї–∞–Ј–∞–љ–Є—П–Љ–Є –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞. –Х—Б–ї–Є –њ–Њ—Б–ї–µ –Њ—В–Ї–ї—О—З–µ–љ–Є—П —А–∞–Ј—К—С–Љ–∞ –љ–∞ —Н–Ї—А–∞–љ–µ –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞ –њ–Њ—П–≤–ї—П–µ—В—Б—П —Б–Є–≥–љ–∞–ї, —В–Њ —Б–Є—Б—В–µ–Љ–∞ CAN-–±—Г—Б —Б–љ–Њ–≤–∞ —А–∞–±–Њ—В–∞–µ—В. –Э–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В—М –љ–∞—Е–Њ–і–Є—В—Б—П –≤ —Б–Є—Б—В–µ–Љ–µ, —Б–≤—П–Ј–∞–љ–љ–Њ–є —Б —И—В–µ–њ—Б–µ–ї—М–љ—Л–Љ —А–∞–Ј—К—С–Љ–Њ–Љ. –Т—Б–µ –Њ—В–Ї–ї—О—З—С–љ–љ—Л–µ —А–∞–љ–µ–µ —А–∞–Ј—К—С–Љ—Л –љ—Г–ґ–љ–Њ –њ–Њ—Б—В–∞–≤–Є—В—М –љ–∞ –Љ–µ—Б—В–Њ. –°–ї–µ–і—Г—О—Й–∞—П –Ј–∞–і–∞—З–∞ —Б–Њ—Б—В–Њ–Є—В –≤ —В–Њ–Љ, —З—В–Њ–±—Л –Њ–њ—А–µ–і–µ–ї–Є—В—М, –Ї–∞–Ї–Њ–Љ—Г –Є–Љ–µ–љ–љ–Њ —Г–њ—А–∞–≤–ї—П—О—Й–µ–Љ—Г —Г—Б—В—А–Њ–є—Б—В–≤—Г –њ—А–Є–љ–∞–і–ї–µ–ґ–Є—В —А–∞–Ј—К—С–Љ, –Ї–Њ—В–Њ—А—Л–є –Њ—В–љ–Њ—Б–Є—В—Б—П –Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ–є —Б–Є—Б—В–µ–Љ–µ. –Ч–і–µ—Б—М –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М –љ–Є–Ї–∞–Ї–Є—Е –і–∞–љ–љ—Л—Е –љ–µ –њ—А–Є–≤–Њ–і–Є—В. –Ф–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л —Г–њ—А–Њ—Б—В–Є—В—М –њ–Њ–Є—Б–Ї –Є —Б–і–µ–ї–∞—В—М –µ–≥–Њ –±–Њ–ї–µ–µ —Н—Д—Д–µ–Ї—В–Є–≤–љ—Л–Љ, –љ—Г–ґ–љ–Њ —Б–љ–Њ–≤–∞ –Љ–µ—В–Њ–і–Њ–Љ –њ—А–Њ–± –≤—Л—П—Б–љ–Є—В—М, –Ї–∞–Ї–Є–µ –Є–Љ–µ–љ–љ–Њ —Б–Є—Б—В–µ–Љ—Л –љ–µ —А–∞–±–Њ—В–∞—О—В. –Я—А–Є –љ–∞–ї–Є—З–Є–Є —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї –Є –Є–љ—Л—Е –і–∞–љ–љ—Л—Е –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, –Њ–± —Н–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Њ–Љ —Б–Њ–µ–і–Є–љ–µ–љ–Є–Є –Є —А–∞–Ј–Љ–µ—Й–µ–љ–Є–Є –Њ—В–і–µ–ї—М–љ—Л—Е –±–ї–Њ–Ї–Њ–≤ —Г–њ—А–∞–≤–ї–µ–љ–Є—П, –љ–µ–Є—Б–њ—А–∞–≤–љ—Г—О —Б–Є—Б—В–µ–Љ—Г –Љ–Њ–ґ–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М –±–µ–Ј–Њ –≤—Б—П–Ї–Њ–≥–Њ —В—А—Г–і–∞. –Ю—В–Ї–ї—О—З–∞—П —А–∞–Ј—К—С–Љ CAN-–±—Г—Б –љ–∞ —Г–њ—А–∞–≤–ї—П—О—Й–µ–Љ —Г—Б—В—А–Њ–є—Б—В–≤–µ, –Є –њ–Њ–і–Ї–ї—О—З–∞—П —А–∞–Ј—К—С–Љ –љ–∞ —А–∞—Б–њ—А–µ–і–µ–ї–Є—В–µ–ї–µ –њ–Њ—В–µ–љ—Ж–Є–∞–ї–Њ–≤, –Љ–Њ–ґ–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М, –љ–∞—Е–Њ–і–Є—В—Б—П –ї–Є –њ—А–Є—З–Є–љ–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –≤ –Ї–∞–±–µ–ї—М–љ–Њ–Љ —Б–Њ–µ–і–Є–љ–µ–љ–Є–Є –Є–ї–Є –≤ —Г–њ—А–∞–≤–ї—П—О—Й–µ–Љ —Г—Б—В—А–Њ–є—Б—В–≤–µ. –Х—Б–ї–Є –љ–∞ –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–µ –Љ–Њ–ґ–љ–Њ —А–∞—Б–њ–Њ–Ј–љ–∞—В—М —Б–Є–≥–љ–∞–ї—Л, —В–Њ —Б–Є—Б—В–µ–Љ–∞ CAN-–±—Г—Б –љ–∞—Е–Њ–і–Є—В—Б—П –≤ —А–∞–±–Њ—З–µ–Љ —Б–Њ—Б—В–Њ—П–љ–Є–Є –Є –Ї–∞–±–µ–ї—М–љ–Њ–µ —Б–Њ–µ–і–Є–љ–µ–љ–Є–µ —В–∞–Ї–ґ–µ –љ–∞—Е–Њ–і–Є—В—Б—П –≤ —А–∞–±–Њ—З–µ–Љ —Б–Њ—Б—В–Њ—П–љ–Є–Є. –Х—Б–ї–Є –њ–Њ—Б–ї–µ –њ–Њ–і–Ї–ї—О—З–µ–љ–Є—П —Г–њ—А–∞–≤–ї—П—О—Й–µ–≥–Њ —Г—Б—В—А–Њ–є—Б—В–≤–∞ —Б–Є–≥–љ–∞–ї—Л –љ–∞ –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–µ —А–∞—Б–њ–Њ–Ј–љ–∞—В—М –љ–µ–≤–Њ–Ј–Љ–Њ–ґ–љ–Њ, —В–Њ –њ—А–Є—З–Є–љ–∞ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П –≤ –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є —Б–∞–Љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї—П—О—Й–µ–≥–Њ —Г—Б—В—А–Њ–є—Б—В–≤–∞. –Х—Б–ї–Є —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ —Д–∞–Ї—В –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –Ї–∞–±–µ–ї—М–љ–Њ–≥–Њ —Б–Њ–µ–і–Є–љ–µ–љ–Є—П, —В–Њ, –Є–Ј–Љ–µ—А—П—П —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –Є –љ–∞–њ—А—П–ґ–µ–љ–Є–µ, –Љ–Њ–ґ–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М –Ј–∞–Љ—Л–Ї–∞–љ–Є–µ –љ–∞ –Љ–∞—Б—Б—Г –Є–ї–Є –љ–∞ –њ–ї—О—Б, –Є–ї–Є –Ј–∞–Љ—Л–Ї–∞–љ–Є–µ –Љ–µ–ґ–і—Г –њ—А–Њ–≤–Њ–і–∞–Љ–Є. –Т –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П—Е, –љ–µ –Є–Љ–µ—О—Й–Є—Е —А–∞—Б–њ—А–µ–і–µ–ї–Є—В–µ–ї—П –њ–Њ—В–µ–љ—Ж–Є–∞–ї–Њ–≤, –њ–Њ–Є—Б–Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–Є –њ–Њ—В—А–µ–±—Г–µ—В –Ј–љ–∞—З–Є—В–µ–ї—М–љ–Њ –±–Њ–ї—М—И–Є—Е —Г—Б–Є–ї–Є–є. –Ю—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ –њ—А–Є–і—С—В—Б—П –њ–Њ–і–Ї–ї—О—З–∞—В—М –Ї –њ—А–Њ–≤–Њ–і–∞–Љ CAN-–±—Г—Б –≤ –њ–Њ–і—Е–Њ–і—П—Й–µ–Љ –і–ї—П —Н—В–Њ–≥–Њ –Љ–µ—Б—В–µ (–љ–∞–њ—А–Є–Љ–µ—А, –љ–∞ —А–∞–Ј—К—С–Љ–љ–Њ–Љ —Б–Њ–µ–і–Є–љ–µ–љ–Є–Є –±–ї–Њ–Ї–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П). –Ч–∞—В–µ–Љ –љ—Г–ґ–љ–Њ –њ–Њ –Њ—З–µ—А–µ–і–Є —Б–љ–Є–Љ–∞—В—М –≤—Б–µ —Г–њ—А–∞–≤–ї—П—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞, –Є —А–∞–Ј—К—С–Љ–љ—Л–µ —Б–Њ–µ–і–Є–љ–µ–љ–Є—П CAN-–±—Г—Б –Њ—В—Б–Њ–µ–і–Є–љ—П—В—М –љ–µ–њ–Њ—Б—А–µ–і—Б—В–≤–µ–љ–љ–Њ –Њ—В –±–ї–Њ–Ї–Њ–≤ —Г–њ—А–∞–≤–ї–µ–љ–Є—П. –Т —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ —В–∞–Ї–ґ–µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Є–Љ–µ—В—М —В–µ—Е–љ–Є—З–µ—Б–Ї—Г—О –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є—О —Б –і–∞–љ–љ—Л–Љ–Є –Њ–± –∞–≤—В–Њ–Љ–Њ–±–Є–ї–µ, —З—В–Њ–±—Л –Њ–њ—А–µ–і–µ–ї–Є—В—М, –Ї–∞–Ї–Є–µ —Г–њ—А–∞–≤–ї—П—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Є –≥–і–µ —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ—Л. –Я–µ—А–µ–і –Њ—В–Ї–ї—О—З–µ–љ–Є–µ–Љ —А–∞–Ј—К—С–Љ–Њ–≤ –Є –њ–Њ—Б–ї–µ –Њ—В–Ї–ї—О—З–µ–љ–Є—П —А–∞–Ј—К—С–Љ–Њ–≤ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –љ–∞–±–ї—О–і–∞—В—М –Ј–∞ –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–µ–Љ –љ–∞ —Н–Ї—А–∞–љ–µ –Њ—Б—Ж–Є–ї–ї–Њ—Б–Ї–Њ–њ–∞. –Я–Њ—Б–ї–µ–і—Г—О—Й–Є–µ –і–µ–є—Б—В–≤–Є—П –љ–Є—З–µ–Љ –љ–µ –Њ—В–ї–Є—З–∞—О—В—Б—П –Њ—В —В–µ—Е, –Ї–Њ—В–Њ—А—Л–µ –Љ—Л –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–ї–Є –љ–∞ –њ—А–Є–Љ–µ—А–µ –љ–∞—И–µ–≥–Њ –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –Ф–ї—П –њ—А–Њ–≤–µ—А–Ї–Є —А–µ–Ј–Є—Б—В–Њ—А–љ—Л—Е –њ–µ—А–µ–Љ—Л—З–µ–Ї –љ—Г–ґ–љ–Њ, —З—В–Њ–±—Л CAN-–±—Г—Б –љ–∞—Е–Њ–і–Є–ї—Б—П –≤ —Б–Њ—Б—В–Њ—П–љ–Є–Є –њ–Њ–Ї–Њ—П (Sleepmode). –£–њ—А–∞–≤–ї—П—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –њ—А–Є –њ—А–Њ–≤–µ–і–µ–љ–Є–Є –Є–Ј–Љ–µ—А–µ–љ–Є–є –і–Њ–ї–ґ–љ—Л –±—Л—В—М –њ–Њ–і–Ї–ї—О—З–µ–љ—Л. –Ю–±—Й–µ–µ —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ, –Ї–Њ—В–Њ—А–Њ–µ —Б–Ї–ї–∞–і—Л–≤–∞–µ—В—Б—П –њ–∞—А–∞–ї–ї–µ–ї—М–љ–Њ –≤–Ї–ї—О—З—С–љ–љ—Л—Е –Њ–і–Є–љ–∞–Ї–Њ–≤—Л—Е —А–µ–Ј–Є—Б—В–Њ—А–Њ–≤ –њ–Њ 120 –Ю–Љ, —Б–Њ—Б—В–∞–≤–ї—П–µ—В 60 –Ю–Љ. –≠—В–Њ —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ –Є–Ј–Љ–µ—А—П–µ—В—Б—П –Љ–µ–ґ–і—Г –њ—А–Њ–≤–Њ–і–љ–Є–Ї–∞–Љ–Є CAN- High –Є CAN-Low. –£—Б—В–∞–љ–Њ–≤–Ї–∞ –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л—Е —Г—Б—В—А–Њ–є—Б—В–≤ –£—Б—В–∞–љ–Њ–≤–Ї–∞ –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л—Е —Г—Б—В—А–Њ–є—Б—В–≤, –љ–∞–њ—А–Є–Љ–µ—А, —Б–Є—Б—В–µ–Љ –љ–∞–≤–Є–≥–∞—Ж–Є–Є, –і–ї—П —А–∞–±–Њ—В—Л –Ї–Њ—В–Њ—А—Л—Е –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–Њ–ї—Г—З–µ–љ–Є–µ —Б–Є–≥–љ–∞–ї–Њ–≤ –Є–Ј —Б–Є—Б—В–µ–Љ—Л CAN-–±—Г—Б, —П–≤–ї—П–µ—В—Б—П —Б–ї–Њ–ґ–љ–Њ–є –њ—А–Њ–±–ї–µ–Љ–Њ–є. –Ю–љ–∞ –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П, –≤ –њ–µ—А–≤—Г—О –Њ—З–µ—А–µ–і—М, –≤ —В–Њ–Љ, —З—В–Њ–±—Л –љ–∞–є—В–Є —Г–і–Њ–±–љ–Њ–µ –Љ–µ—Б—В–Њ –і–ї—П –і–Њ—Б—В—Г–њ–∞, –љ–∞–њ—А–Є–Љ–µ—А, –Ї –њ–Њ–ї—Г—З–µ–љ–Є—О —Б–Є–≥–љ–∞–ї–∞ —Б–Ї–Њ—А–Њ—Б—В–Є –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, –∞ —Б–і–µ–ї–∞—В—М —Н—В–Њ, –љ–µ –Є–Љ–µ—П –њ–Њ–і —А—Г–Ї–Њ–є —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–є –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є–Є –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П, –Њ—З–µ–љ—М —Б–ї–Њ–ґ–љ–Њ. –Т–Њ –≤—Б–µ–Љ–Є—А–љ–Њ–є —Б–µ—В–Є —Б—Г—Й–µ—Б—В–≤—Г—О—В —Б–∞–є—В—Л, –≥–і–µ –Љ–Њ–ґ–љ–Њ –љ–∞–є—В–Є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Њ —Б–њ–Њ—Б–Њ–±–∞—Е –Є –Љ–µ—Б—В–∞—Е –њ–Њ–і–Ї–ї—О—З–µ–љ–Є—П –Є —Г—Б—В–∞–љ–Њ–≤–Ї–Є —А–∞–Ј–ї–Є—З–љ—Л—Е —Г—Б—В—А–Њ–є—Б—В–≤. –≠—В–Є —Б–≤–µ–і–µ–љ–Є—П, —А–∞–Ј—Г–Љ–µ–µ—В—Б—П, –љ–µ –і–∞—О—В –љ–Є–Ї–∞–Ї–Є—Е –≥–∞—А–∞–љ—В–Є–є, –њ–Њ—Н—В–Њ–Љ—Г –≤ –ї—О–±–Њ–Љ —Б–ї—Г—З–∞–µ –≤–µ—Б—М —А–Є—Б–Ї –љ–∞ —Б–µ–±—П –±–µ—А—С—В –∞–≤—В–Њ—А–µ–Љ–Њ–љ—В–љ–∞—П –Љ–∞—Б—В–µ—А—Б–Ї–∞—П, –µ—Б–ї–Є —А–µ—И–Є—В—Б—П –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М —В–∞–Ї–Є–µ –і–∞–љ–љ—Л–µ. –Ю–і–љ–∞–Ї–Њ –≤ –ї—О–±–Њ–Љ —Б–ї—Г—З–∞–µ —Б–∞–Љ—Л–є –љ–∞–і—С–ґ–љ—Л–є —Б–њ–Њ—Б–Њ–± вАФ —Н—В–Њ –Њ–Ј–љ–∞–Ї–Њ–Љ–Є—В—М—Б—П —Б —В–µ—Е–љ–Є—З–µ—Б–Ї–Њ–є –і–Њ–Ї—Г–Љ–µ–љ—В–∞—Ж–Є–µ–є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—П –∞–≤—В–Њ–Љ–Њ–±–Є–ї—П. –Ф–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л –њ–Њ–Ј–љ–∞–Ї–Њ–Љ–Є—В—М—Б—П —Б–Њ –≤—Б–µ–Љ–Є –≤–Њ–Ј–Љ–Њ–ґ–љ—Л–Љ–Є —Б–Є—Б—В–µ–Љ–∞–Љ–Є CAN-–±—Г—Б, –Є–Ј—Г—З–Є—В—М –њ–µ—А–µ–і–∞—З—Г –і–∞–љ–љ—Л—Е, —Г—Б—В—А–Њ–є—Б—В–≤–Њ, —А–∞–±–Њ—В—Г –Є –њ–Њ–Є—Б–Ї –љ–µ–Є—Б–њ—А–∞–≤–љ–Њ—Б—В–µ–є, –і–∞–ї–µ–µ вАФ –Ї–∞–Ї –Љ–Њ–ґ–љ–Њ —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—В—М –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ вАФ –Љ—Л –≤ –ї—О–±–Њ–Љ —Б–ї—Г—З–∞–µ —Б–Њ–≤–µ—В—Г–µ–Љ –њ—А–Њ–є—В–Є —Б–њ–µ—Ж–Є–∞–ї—М–љ–Њ–µ –Њ–±—Г—З–µ–љ–Є–µ.
–°–њ–∞—Б–Є–±–Њ, —З—В–Њ –Њ—Б–Є–ї–Є–ї–Є –±–Њ–ї—М—И—Г—О –љ–∞—И—Г —Б—В–∞—В—М—О. –Э–∞–і–µ–µ–Љ—Б—П, –Њ–љ–∞ –Т–∞–Љ –њ—А–Є–≥–Њ–і–Є—В—Б—П.
